Динамический расчет системы автоматического управления
Система автоматического управления (далее по тексту САУ, или «система») предназначена для линейного перемещения горизонтального стола применительно к станкам фрезерной или координатно-расточной групп.
Состав системы
Блок-схема системы автоматического управления приведена на рис. 1, а комбинированная схема силовой части - на рис. 2. САУ построена как система подчиненного регулирования, выполненная по контурам напряжения (тока), скорости, положения. В контуре напряжения (тока) имеется нелинейный элемент (на схеме не показан).
На рисунках приняты следующие обозначения:
![]() - управляющее воздействие;
- управляющее воздействие;
![]() - управляемая (регулируемая) координата;
- управляемая (регулируемая) координата;
![]() - ошибка системы;
- ошибка системы;
![]() - сигнал задания по управляющему воздействию;
- сигнал задания по управляющему воздействию;
![]() - сигнал главной обратной связи по регулируемой координате;
- сигнал главной обратной связи по регулируемой координате;
![]() - сигнал по ошибке;
- сигнал по ошибке;
ЧЭ - чувствительный элемент;
РП - регулятор положения;
У, КЗ - усилитель и корректирующее звено в контуре положения;
РС - регулятор скорости;
РН - регулятор напряжения (тока);
ТП - транзисторный (тиристорный) преобразователь;
М - исполнительный двигатель;
Р1 - механический редуктор силовой;
МП - механическая передача (шариковинтовая передача (ШВП));
Н - нагрузка (стол с деталью);
ДН, У - датчик напряжения, усилитель;
ТГ - тахогенератор;
Р2 - механический редуктор, приборный;
ДОС - датчик обратной связи;
ВТ - вращающийся трансформатор;
ПФН - преобразователь фаза-напряжение;
U1, U2 ,U3 , UЯ - промежуточные координаты (управляющие напряжения соответственно РС, РН, ТП, ИД);
jД, j1, j2 - промежуточные координаты (угол поворота соответственно ИД, ШВП, ВТ);
![]() ,
, ![]() - выходное напряжение, соответственно, ТГ и ВТ.
- выходное напряжение, соответственно, ТГ и ВТ.
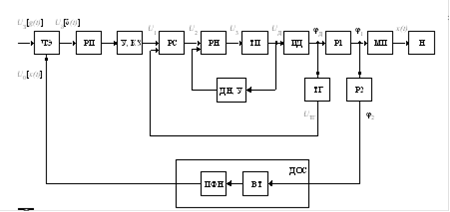
Рис. 1. Блок-схема системы автоматического управления
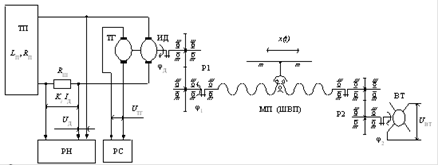
Рис. 2. Комбинированная схема силовой части САУ
- Характеристики системы автоматического управления
- Описание работы системы
- Структурная схема системы
- Формирователь сигнала главной обратной связи и чувствительный элемент
- Силовой редуктор
- Шариковинтовая передача
- Передаточные функции системы
- Синтез корректирующих звеньев контура напряжения (тока)
- Синтез корректирующих звеньев контура скорости
- Выбор схемы корректирующих звеньев и определение значений входящих в нее элементов
- Определение показателей качества системы методом моделирования
- Моделирование САУ в среде MatLab
Статья в тему
Система охранной сигнализации военной техники связи
Вооруженные Силы всегда были и будут неотъемлемым атрибутом государства, основой его территориальной целостности. Сегодня ни одно государство в мире не может в одиночку обеспечить собственную безопасность. В настоящее время внешнеполитическая деятельность Республики Казахстан направлена на недопущен ...