Структурная схема системы
В соответствии с исходной блок-схемой составляется структурная схема системы. Общие правила ее составления следующие.
Система представляется в виде совокупности звеньев и их взаимосвязи согласно заданной блок-схеме.
Элементы, формирующие сигнал единичной обратной связи с единицей измерения управляющего для (системы) контура сигнала, показываются в цепи обратной связи. Далее при описании замкнутой системы коэффициент передачи звена (совокупности звеньев) принимается равным единице.
Элемент, выполняющий сравнение (вычитание) сигналов задания и главной обратной связи, вносится в прямой тракт в виде автономного элемента или в совокупности с элементами, формирующими сигнал главной обратной связи. На схеме дается условное обозначение элемента сравнения, его коэффициент передачи принимается равным единице.
При замыкании внутренних контуров местной единичной обратной связью поступают аналогично пп. 3.2 и 3.3.
Нумерация передаточных функций дается в индексах, порядок нумерации слева направо.
Показываются входная и выходная координаты, ошибка и необходимые для использования в расчетах промежуточные координаты.
Приводится структурная схема системы, и дается расшифровка обозначения передаточных функций. При необходимости отмечаются ее особенности.
Например. Структурная схема системы приведена на рис. 4. На схеме приняты следующие обозначения:
![]() - передаточная схема чувствительного элемента;
- передаточная схема чувствительного элемента;
![]() - передаточная функция регулятора положения;
- передаточная функция регулятора положения;
![]() - передаточная функция последовательного корректирующего звена;
- передаточная функция последовательного корректирующего звена; ![]() - передаточная функция регулятора скорости;
- передаточная функция регулятора скорости;
![]() - передаточная функция регулятор напряжения (тока);
- передаточная функция регулятор напряжения (тока);
![]() - передаточная функция усилителя мощности;
- передаточная функция усилителя мощности;
![]() - передаточная функция двигателя;
- передаточная функция двигателя;
![]() - передаточная функция регулятора;
- передаточная функция регулятора;
![]() - передаточная функция шариковинтовой передачи;
- передаточная функция шариковинтовой передачи;
![]() - передаточная функция датчика напряжения;
- передаточная функция датчика напряжения;
![]() - передаточная функция тахогенератора.
- передаточная функция тахогенератора.
Особенности схемы:
) форма управляющего сигнала - напряжение, крутизна характеристики назначается ниже;
) формирователь сигнала обратной связи выполнен на элементах структурной схемы: шариковинтовая передача, редуктор Р2, вращающийся трансформатор, работающий в фазовом режиме, преобразователь фаза-напряжение;
) элемент сравнения - усилитель с двумя входами;
) имеются внутренние контуры (показать какие) с единичными (неединичными обратными связями).
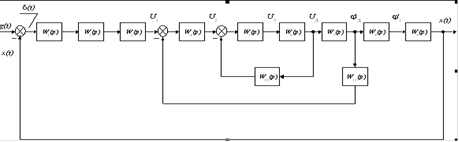
Рис. 4. Структурная схема системы
Статья в тему
Схема электрическая формирователя остатка по модулю
Особенностью подобного вида контроля является то, что с его
помощью решается сравнительно несложная задача - убедиться в неизменности
передаваемой информационной комбинации или восстановить эту информацию, если в
ней произошли искажения. Совсем другие требования возникают при контроле ...