Передаточные функции системы
Разомкнутой системы по управляющему воздействию ![]()
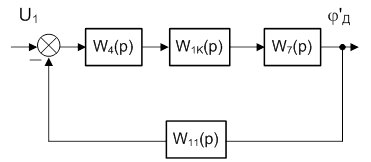
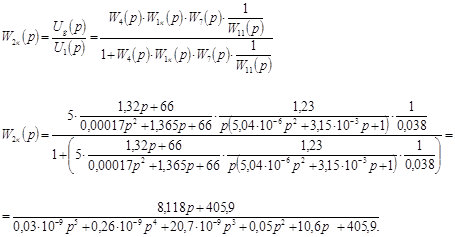
а) 1-й контур представлен в виде системы с обратной связью.
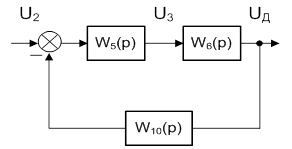
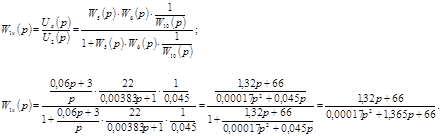
б) 2-й контур скорости представлен в виде с обратной связью:
в) 3-й контур положения представим в виде системы:

разомкнутой
.2 Разомкнутой системы по возмущающему воздействию ![]()
Замкнутой системы по управляющему воздействию ![]()
.4 Замкнутой системы по возмущающему воздействию ![]()
.5 Замкнутой системы по ошибке от управляющего воздействия ![]()
.6 Замкнутой системы по ошибке от возмущающего воздействия![]()

6. Синтез корректирующих звеньев
.1 Общие положения
Синтез систем по заданным показателям качества в конечном итоге состоит в определении вида и параметров корректирующих устройств (последовательных, параллельных, в цепях обратных связей), при введении которых в исходную систему обеспечиваются заданные по ТЗ динамические характеристики.
При выполнении настоящей работы могут быть использованы любые методы синтеза, среди которых наибольшее распространение получили:
метод ЛАЧХ [1];
метод обратных ЛАЧХ [4];
метод типовых (стандартных) уравнений [1, 3].
Характерной особенностью САУ для рассматриваемых видов технологического оборудования является выполнение ее в виде системы подчиненного регулирования [3] с автономными вложенными друг в друга контурами напряжения (тока), скорости. Это позволяет синтезировать ее по контурам, начиная с внутреннего контура регулирования напряжения (тока), который представляется в виде системы с единичной обратной связью. Далее он представляется в виде эквивалентного звена и вкладывается в контур регулирования скорости с единичной обратной связью. Аналогичным образом регулирования скорости в виде эквивалентного звена вкладывается в контур регулирования положения.
Исходные динамические показатели при синтезе контуров приведены в табл. 7.
Таблица 1
|
Тип контура |
Добротность |
Время переходного процесса |
Перерегулирование |
|
РН(Т) |
40-60 |
| |
|
РС |
30-50 |
| |
|
РП |
|
Методика синтеза системы по ЛЧХ
Синтез САУ состоит в следующем: Имеется исходная система с передаточной функцией ![]() . В нее необходимо ввести корректирующее звено с передаточной функцией
. В нее необходимо ввести корректирующее звено с передаточной функцией ![]() , в результате чего система обеспечивает требуемые показатели качества; соответствующая ее ПФ называется желаемой -
, в результате чего система обеспечивает требуемые показатели качества; соответствующая ее ПФ называется желаемой - ![]() . При введении последовательного корректирующего звена в исходную систему имеем
. При введении последовательного корректирующего звена в исходную систему имеем
Статья в тему
Функциональная схема системы автоматического управления
управление частотная фазовая
Автоматика - это отрасль науки и техники охватывающая теорию и практику автоматического управления, а так же принципы построения автоматических систем и образующих их технических средств.
Объектом изучения в теории автоматического управления и регулирования являются ав ...