Исследование критериев оптимизации для нелинейных АС с различными регуляторами
Задачи по управлению тем или иным явлением или процессом, возникающие в повседневной практической деятельности человека, обширны и многообразны. Управление можно определить как совокупность действий, обеспечивающих проведение любого процесса в целях достижения определённых результатов.
Системы автоматического управления (САУ) создаются для того, чтобы автоматически, без непосредственного участия человека поддерживать необходимый режим работы различных обслуживаемых этими автоматами объектов. САУ самостоятельно, без вмешательства извне либо поддерживают постоянными, либо изменяют по заданным законам одну или несколько физических величин, характеризующих процессы, происходящие в обслуживаемых объектах, или же они сами определяют в зависимости от ряда условий нужный или оптимальный закон управления объектом.
Объект, в котором протекает управляемый процесс, называется объектом управления (ОУ).
Управляемый процесс может определяться рядом параметров и их соотношениями. В простых случаях управляемый процесс может достаточно полно определяться одним параметром (координатой).
Частным, но очень важным случаем управления является регулирование, при котором требуемое течение процесса создаётся путём стабилизации одного или нескольких параметров на заданных значениях.
Теория автоматического управления (ТАУ) - наука о процессах управления и общих закономерностях. В организации процесса управления большую роль играет информация, как о задачах управления, так и о его фактических результатах.
При помощи автоматических регуляторов - одной из основных и важнейших разновидностей автоматических управляющих устройств - можно: существенно повысить эффективность ведения технологических процессов, создать условия для применения сверхвысоких и сверхнизких параметров (напряжений, токов, скоростей, давлений, температур, частот и т.п.), освободить обслуживающий персонал от непосредственного участия в осуществлении управления сложными процессами, сократить количество обслуживающего персонала на том или ином объекте, повысить качество выпускаемой продукции, обеспечив высокие точности исполнения всех требований, предъявляемых к ходу и результатам технологических процессов, и, наконец, получить возможность вести требуемый процесс в условиях и местах, недоступных для человека.
Автоматическая система управления (АСУ) включает в себя ОУ - технологический процесс или технологическая установка и управляющее устройство (регулятор). ОУ является неизменной частью системы, если математическая модель его не известна, то аналитически или экспериментально определяют его модель (передаточную функцию).
В зависимости от задачи, которую должна решать АСУ (стабилизация, программное или следящее управление) свойств ОУ и требований к точности и динамике переходного процесса выбирают тип регулятора (его алгоритм функционирования) и исполнительный механизм (ИМ). Составляют структурную схему системы управления и по ней проводят расчёт (при выбранных параметрах настройки регулятора) переходного процесса и определяют качественные показатели системы. Если выбранные параметры настройки регулятора не отвечают поставленным требованиям (не обеспечивают заданную точность и динамику переходного процесса), то следует изменить тип регулятора и вновь провести анализ качества, выбрав оптимальные параметры настройки регулятора - используя методы параметрической оптимизации.
Эта же задача может быть решена другим путём - при выбранном ИМ и заданном ОУ синтезировать структуру системы и параметры настройки регулятора (структурно-параметрическая оптимизация), так чтобы система отвечала заданным требованиям по точности и динамике переходного процесса. Затем необходимо провести расчёт переходного процесса и определить качественные показатели системы.
Задача синтеза системы с заданными показателями качества может быть сведена к задаче выбора типового регулятора, и определения оптимальных, в смысле выбранного критерия качества, настроек его параметров. Это задача параметрического синтеза. Задача выбора оптимальной структуры (закона регулирования) регулятора для объекта и принятого критерия оптимальности может быть решена в рамках структурного синтеза.
В общем случае одноконтурную систему регулирования можно представить блок-схемой изображённой на рисунке 1.1.
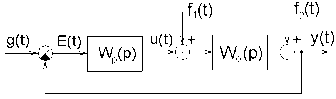
Рис. 1.1.
На систему действуют два типа внешних сигналов: g(t) - задающее воздействие, f(t) - возмущающие воздействия: f1(t) - внутренне, f2(t) - внешнее.
Система регулирования должна удовлетворять двум основным требованиям:
а) с максимально возможной точностью отрабатывать задающее воздействие g(t), т.е. y(t)»g(t) и при этом необходимо, чтобы система была легко управляемой, т.е. производная ¶y/¶g должна быть достаточно большой во всём диапазоне изменения g(t);
б) по возможности не реагировать на возмущения f(t), т.е. ошибка e(t), возникающая под действием возмущений, должна быть наименьшей, её необходимо максимально быстро ликвидировать. Система должна слабо реагировать на возмущения, т.е. производная ¶y/¶f должна быть по возможности малой.
Цель данной курсовой работы: смоделировать структурные схемы для ОУ с использованием П регулятора, ПИ регулятора, И регулятора, ПИД регулятора, найти их ошибки непрерывные(интегральное значение I1) и по десятичному логарифму (I1![]() ,подобрав при этом оптимальные коэффициенты и свести ошибки к минимуму,сравнить результаты ,полученные в среде Matlab с использованием графиков, по результатам сделать выбор оптимального регулятора для заданного ОУ.
,подобрав при этом оптимальные коэффициенты и свести ошибки к минимуму,сравнить результаты ,полученные в среде Matlab с использованием графиков, по результатам сделать выбор оптимального регулятора для заданного ОУ.
Задачи:
Составить структурную схему в среде Matlabдля П регулятора;
Составить структурную схему в среде Matlabдля И регулятора;
Составить структурную схему в среде Matlabдля ПИ регулятора;
Составить структурную схему в среде Matlabдля ПИД регулятора;
Сделать сопоставительную таблицу для всех регуляторов;
Выбрать оптимальный регулятор для заданного ОУ.
- Анализ свойств объекта управления
- Анализ типовых регуляторов и выбор типа регулятора
- Метод интегральной оценки качества
- Метод полной компенсации
- Расчет оптимальных настроек П регулятора
- Расчёт оптимальных параметров настройки И регулятора
- Расчёт оптимальных параметров настройки ПИ регулятора
- Расчет оптимального значения ПИД регулятора
Статья в тему
Параметрический синтез антенны базовой станции по заданным требованиям к диаграмме направленности
Антенной
называется радиотехническое устройство, предназначенное для изучения или приема
электромагнитных волн. Антенна является одним из важнейших элементов любой
радиотехнической системы, связанной с излучением или приемом радиоволн. К таким
системам относят: системы радиосвязи, ра ...