Расчёт оптимальных параметров настройки ПИ регулятора
Структурная формула в Matlabбудет выглядеть следующим образом:
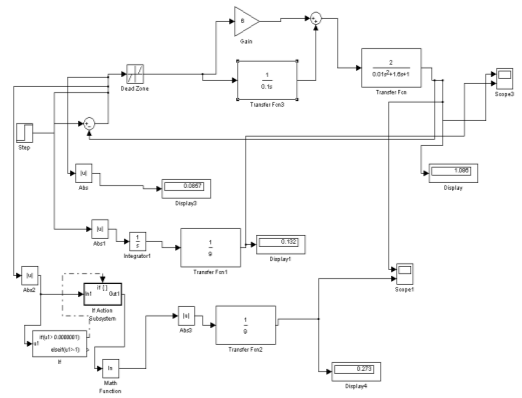
Здесь мы взяли к=6, Т=0.1с,получили ошибку I1=![]() =
=![]() , Туст=9с.
, Туст=9с.
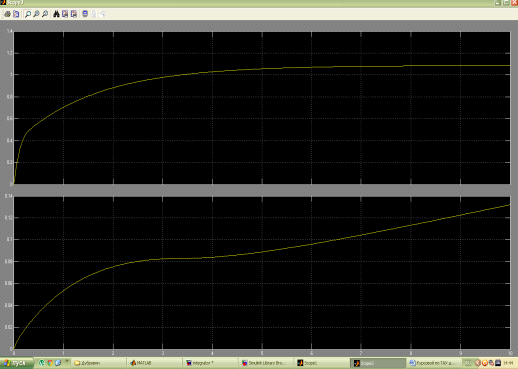
Графики следующие:
Минимизируем ошибку I2=![]() . Схема будет следующей:
. Схема будет следующей:
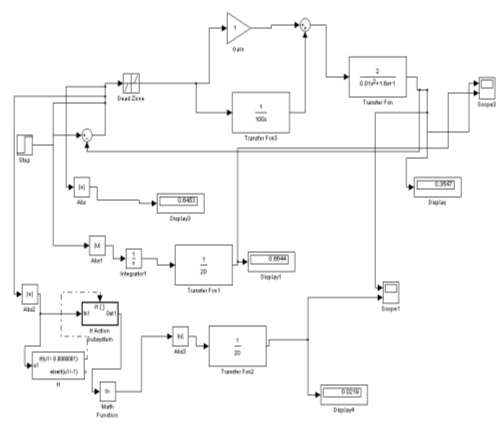
При к=1, Т=100с, I2=![]() , Туст=20с
, Туст=20с
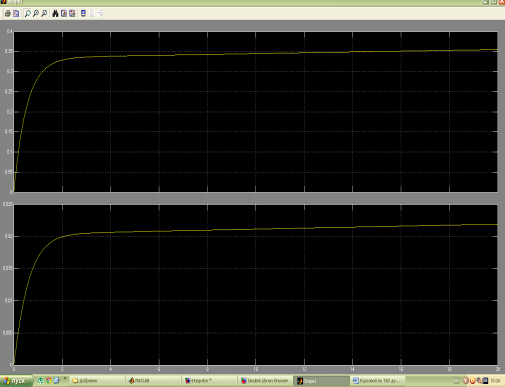
Графики будут следующие:
Статья в тему
Светодиоды, их основные параметры и характеристики
Светодиоды,
или светоизлучающие диоды (СИД, в английском варианте LED - light emitting
diode) - полупроводниковый прибор, излучающий некогерентный свет при
пропускании через него электрического тока (рисунок 1). Работа основана на
физическом явлении возникновения светового излучения ...