Расчет оптимального значения ПИД регулятора
Схема ПИД регулятора будет выглядить следующим образом:
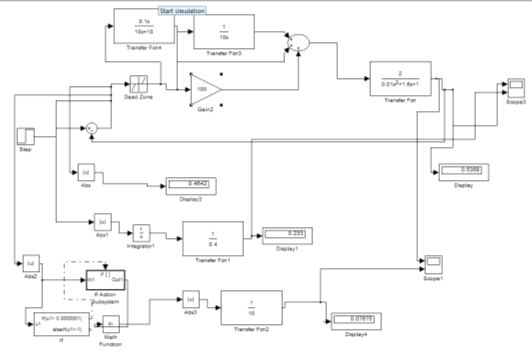
Т1=10с ,Т=10с,к=100. Ошибка I1=![]() =0.233, Туст=0.4с
=0.233, Туст=0.4с
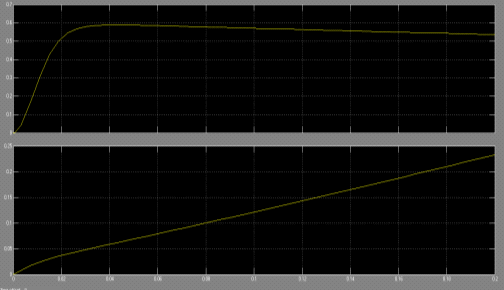
Графики следующие:
Минимизируем I2=![]() .Схема будет следующей:
.Схема будет следующей:
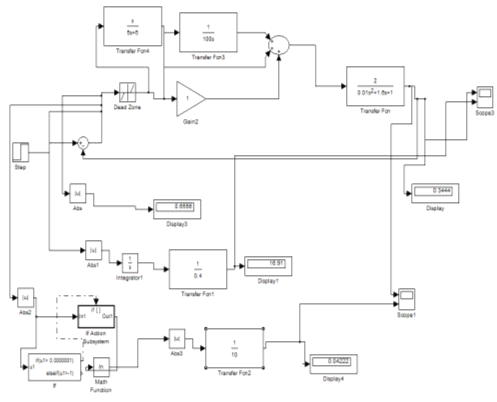
Т1=5с ,Т=100с,к=1. Ошибка I2=![]() =0.04, Туст=10с.
=0.04, Туст=10с.
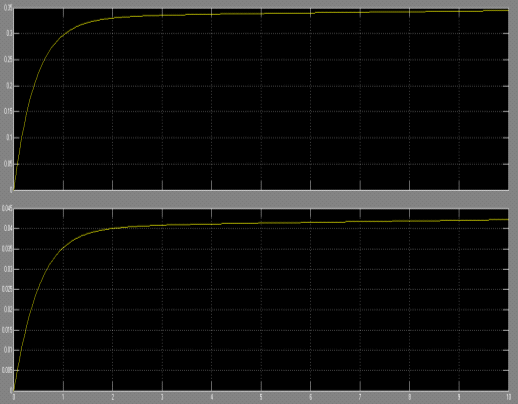
Графики будут следующие:
Выводы
Составим сопоставительную таблицу всех регуляторов, и выберем и разъясним выбор определенного регулятора для нашей функции:
|
Регулятор |
I1= |
I2= |
Туст для |
Туст для |
|
П |
0.58 |
6.834 |
0.1 |
0.1 |
|
И |
0.210 |
0.006 |
10 |
100 |
|
ПИ |
0.132 |
0.02 |
9 |
20 |
|
ПИД |
0.233 |
0.04 |
0.4 |
10 |
Исходя из таблицы, можно сделать вывод о том, что нам для ОУ более всего подходит ПИД- регулятор, так как он имеет наименьшую ошибку по сравнению с другими регуляторами(при ![]()
) и при ![]() . Так же стоить отметить П регулятор, он устанавливает время минимальное, но этот регулятор приводит систему в неустойчивое состояние.
. Так же стоить отметить П регулятор, он устанавливает время минимальное, но этот регулятор приводит систему в неустойчивое состояние.
Мы видим, что ошибка по десятичному логарифму меньше чем ошибка интегральная, то есть :
1=![]() < I2=
< I2=![]() .
.
Заключение
В данной курсовой работе мы смоделировали структурную схему заданную в задании с использованием разных регуляторов в среде Matlab:
П- регулятора;
ПИ - регулятора;
И - регулятора;
ПИД регулятора.
Сделали сопоставительную таблицу для регуляторов, с помощью которой подобрали оптимальный для заданного объекта управления, расчитали ошибки I1=![]() и I2=
и I2=![]() .
.
Статья в тему
САУ громкостью звука в аудитории
Цель курсового проекта - разработать систему автоматического управления громкостью звука в аудитории. Необходимо обеспечить заданные запасы устойчивости по амплитуде и по фазе, при заданных показателях качества. При необходимости САУ следует скорректировать и вычислить параметры корректирующего устр ...