Расчёт оптимальных параметров настройки И регулятора
Схема И регулятора будет выглядеть следующим образом:
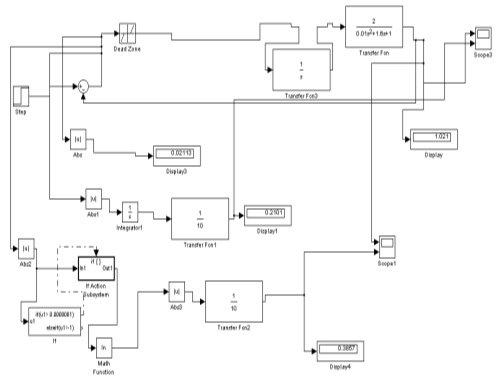
Мы видим, что при Т=1с, ошибка I1=![]() =0.210 , Туст=10с
=0.210 , Туст=10с
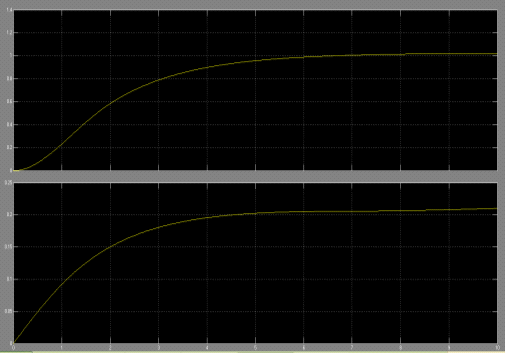
Графики будут следующие:
Минимизируем ошибку I2=![]()
Схема будет следующей:
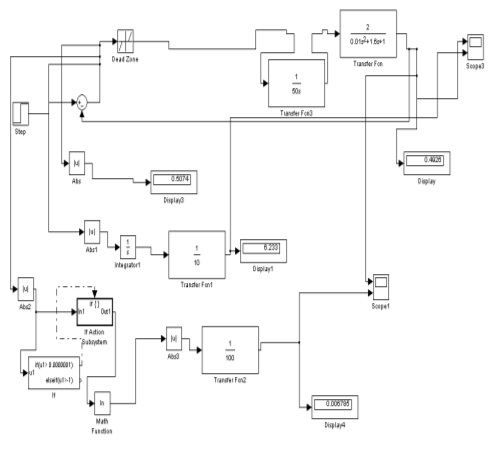
Мы видим, что при Т=50с, I2=![]() , Туст=100с
, Туст=100с
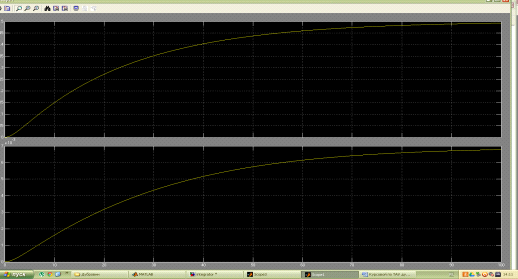
Графики будут следующие:
Статья в тему
Комбинационная схема управляющая семисегментным индикатором
Микроэлектроника
- это современная квинтэссенция электроники, в которой ее информационные
свойства достигают максимума, то есть плотность потоков информации на единицу
веса намного превосходят таковую в остальной электронике, а тем более в электротехнике.
Задача микроэлектроники - су ...