Расчет оптимальных настроек П регулятора
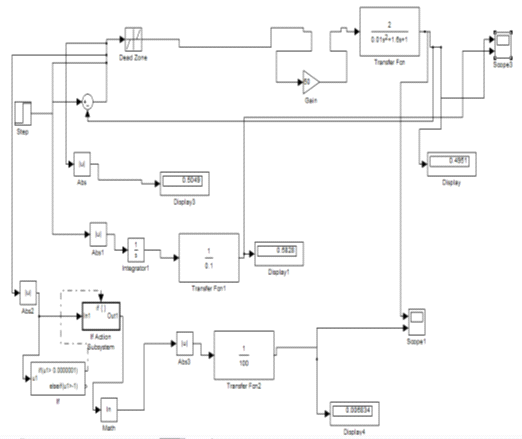
Структурная схема в среде Matlab будет выглядить следующим образом:
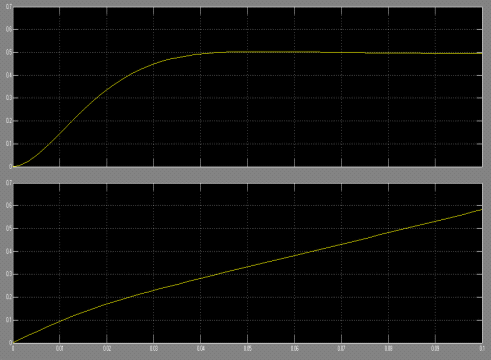
При к=50, ошибка I1=![]() =0.58, Туст=0.1
=0.58, Туст=0.1
Графики следующие:
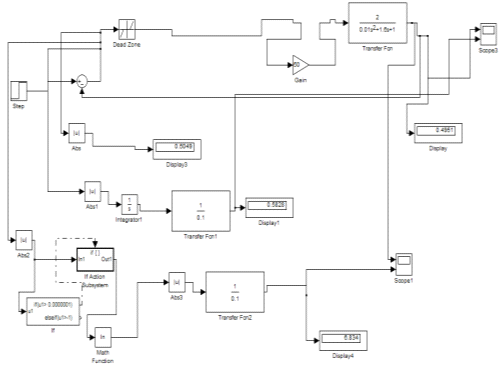
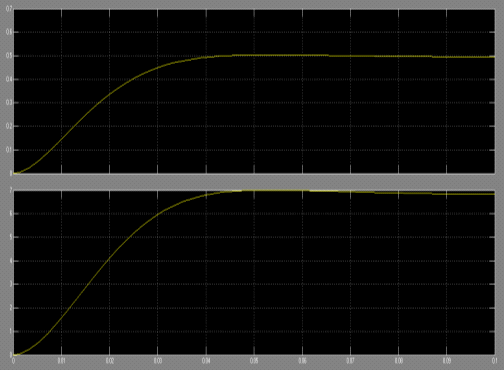
При к=50, I2=![]() =6.834, Туст=0.1с.
=6.834, Туст=0.1с.
Схема следующая:
Графики следующие:
Статья в тему
Система централизованного контроля температуры
Система
централизованного контроля температуры (СЦКТ) предназначена для измерения
температуры объекта и получении информации о выходе температуры разных точек
объекта за границы уставок.
Система
централизованного контроля (СЦК) позволяет собирать и обрабатывать большое
количество ...