Синтез и обоснование элементов принципиальной схемы
Тген=3RC
где Тген - период повторения импульсов в мс, R - сопротивление резисторов в Ом, C - емкость конденсатора в мкФ.
Выберем Тген =0,6мс.
Резистор R выбираем таким, чтобы он не ограничивал входной ток микросхемы Iвх.max=1,6 мА.
Iвх.max рассчитывается по формуле:
Iвх.max=Uвх/R
где Iвх.max - входной ток микросхемы, Uвх.max - напряжение на входе микросхемы, равное 5В. Из этой формулы можно найти сопротивление резистора R:
= Uвх/ Iвх.max
=5В/1,6мА=3125 Ом=3125Ом. С=0,2мкФ
Диоды выбираем исходя из того, чтобы их паразитная ёмкость была меньше, как минимум в 100 раз, ёмкости времязадающих конденсаторов, а их стоимость была наименьшей. По этим параметрам подходит диод КД522. Его параметры приведены в таблице 1.
Таблица 1 Параметры диода КД522
|
Iпрмах |
Iобрмах |
tи |
Uпрмах |
Uобрмах |
Iпр |
fр |
Сд |
|
А |
А |
мкс |
В |
В |
А |
кГц |
пФ |
|
1,5 |
5 |
10 |
1,1 |
60 |
0,01 |
50000 |
3 |
Устройство оповещения должно выполнять следующие функции:
. Сбор данных с датчиков и принятие по ним решения;
. Подача сигналов: на формирование кода, соответствующего сработавшему датчику; на формирование контрольного сигнала, если в течение определённого промежутка времени ни один датчик не сработал; на формирование синхросигнала.
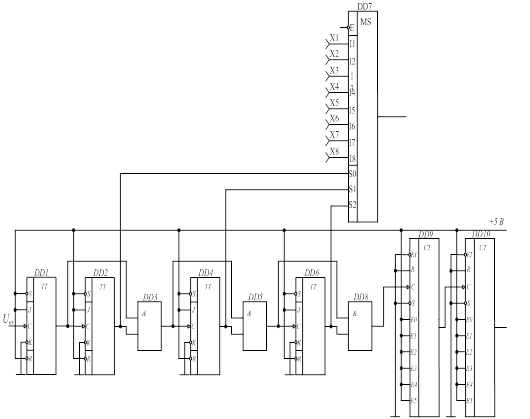
Рисунок 3.9 Принципиальная схема опросного устройства
При срабатывании датчика, на его выходе появляется высокий уровень - 3В, а до этого присутствует низкий уровень - 0В. Датчики подключаются ко входам I1-I8 мультиплексора, а затем в зависимости от комбинации, поступающей на информационные входы S0-S2, поочередно подключаются к его выходу. Таким образом, при срабатывании датчика на выходе мультиплексора появиться высокий уровень, который послужит сигналом для формирования кода сработавшего датчика.
Чтобы обеспечить последовательное подключение входов мультиплексора к его выходу, необходимо на его информационные входы S0-S3 подавать в двоичном коде числа, от 0 до 7. Эту функцию выполняет счетчик, собранный на элементах DD1-DD6. На вход схемы поступает последовательность прямоугольных импульсов с T=0,6мс от генератора тактовых импульсов. Далее каждым JK-триггером эта последовательность делится на два, а после каждого элемента и увеличивается в два раза скважность импульсов. Каждый счетчик (DD9-DD10) делит входную последовательность на 64 раза. Исходя из этого, на выходе счетчика DD10 один раз в 20с будет формироваться импульс длительностью 1,2мс, который служит сигналом для формирования контрольного сигнала.
Перед посылкой контрольного сигнала или кода датчика, будет формироваться сигнал синхронизации. Схема формирователя этого сигнала представлена на рисунке 3.10.
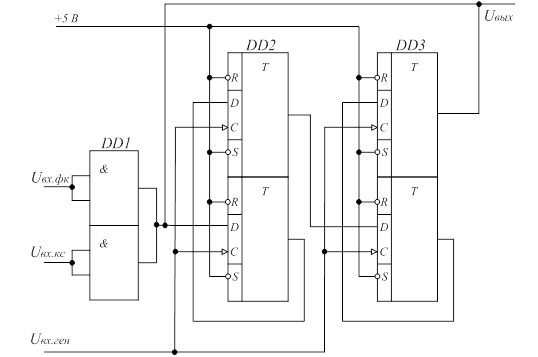
Рисунок 3.10 Принципиальная схема формирователя сигнала синхронизации
Импульс на формирование кода поступает на вход схемы формирования сигнала синхронизации и на выход проходит двумя путями:
- без задержки;
задержавшись на два такта, что обеспечивается линиями задержки DD2, DD3.
Статья в тему
Автоматизация управление асинхронным электроприводом
Автоматизация - это комплексная конструктивно-технологическая задача
создания принципиально новой техники на базе прогрессивных процессов обработки,
контроля, сборки.
Автоматизация технологических процессов есть совокупность мероприятий по
разработке новых технологических проце ...