Синтез и обоснование элементов принципиальной схемы
По причинам, рассмотренным в предыдущих разделах, применение существующих схем сигнализации либо не обеспечивает необходимой степени охраны, либо не удовлетворяет стоимость охранной системы. Построение охранной сигнализации приемного радиоцентра с использованием, рассмотренной в разделе 2.2 схемы обеспечит высокую надёжность охраны. Но данная схема является довольно сложной, поэтому, чтобы стоимость данного устройства не оказалась высокой, необходимо при его реализации применять современную элементную базу. В данном дипломном проекте из-за сложности всей системы охранной сигнализации приемного радиоцентра стоит цель разработки только его исполнительного комплекта.
Современный этап развития научно-технического прогресса характеризуется широким применением электроники и микроэлектроники во всех сферах жизни и деятельности человека. Важную роль при этом сыграло появление и быстрое совершенствование интегральных микросхем - основной элементной базы современной электроники. Цифровые интегральные микросхемы применяются в вычислительных машинах и комплексах, в электронных устройствах автоматики, цифровых измерительных приборах, аппаратуре связи и передачи данных, медицинской и бытовой аппаратуре, в приборах и т.д.
Цифровые микросхемы предназначены для преобразования и обработки сигналов, изменяющихся по законам дискретной функции. Существуют интегральные схемы транзисторно-транзисторной логики (ТТЛ), на основе КМДП-транзисторов и эмиттерно-связанной логики (ЭСЛ).
Технология ТТЛ основана на биполярных структурах. Базовый элемент ТТЛ (рисунок 3.3) представляет собой схему, содержащую один многоэмиттерный транзистор и один обычный, это логическая схема И-НЕ (функцию И выполняет транзистор VT1, а функцию инверсии выполняет транзистор VT2).
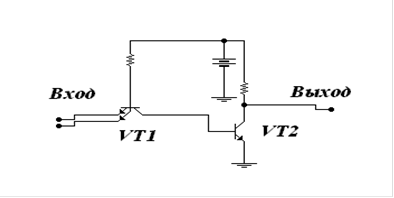
Рисунок 3.3 Базовый элемент ТТЛ
Подобная схема обладает низкой помехоустойчивостью и низким быстродействием, быстродействие можно увеличить, используя сложный инвертор, который позволяет сократить время включения (переход из логического «0» в логическую «1»), но время выключения (переход из логической «1» в логический «0») сократить, не удается.
Более высокое быстродействие позволяют получить схемы семейства ТТЛШ (транзисторно-транзисторная логика с использованием транзисторов с барьером Шотки см. рисунок 3.4). В таких схемах барьер Шотки создает нелинейную обратную связь в транзисторе, в результате транзисторы не входят в режим насыщения, хотя и близки к этому режиму.
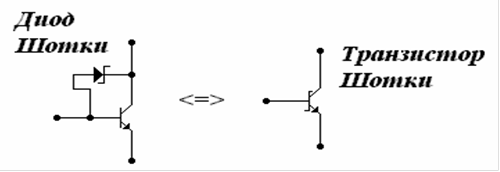
Рисунок 3.4 Транзистор Шотки
Технология ЭСЛ является так же, как и технология ТТЛ, биполярной, т.е. элементы строятся с использованием биполярных структур. Основой элементов ЭСЛ является так называемый «переключатель тока», на основе которого строится базовый элемент этой технологии - ИЛИ-НЕ (см. рисунок 3.5), по выходу 1 данной схемы реализуется логическая функция ИЛИ-НЕ, а по выходу2 - ИЛИ.
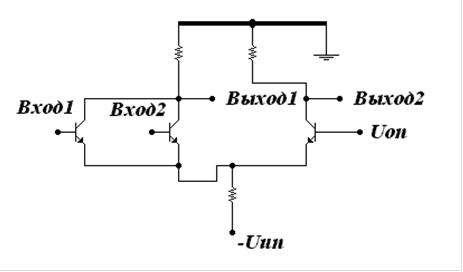
Рисунок 3.5 Базовый элемент ЭСЛ.
Из-за низкого входного сопротивления схемы ЭСЛ обладают высоким быстродействием и работают преимущественно в активном режиме, следовательно, помеха, попавшая на вход, усиливается. Для повышения помехоустойчивости шину коллекторного питания делают очень толстой и соединяют с общей шиной.
По сравнению со схемами ТТЛ, схемы ЭСЛ обладают более высоким быстродействием, но помехоустойчивость у них гораздо ниже. Схемы ЭСЛ занимают большую площадь на кристалле, потребляют большую мощность в статическом состоянии, так как выходные транзисторы открыты и через них протекает большой ток. Схемы, построенные по данной технологии не совместимы со схемами, построенными по другим технологиям, использующим источники положительного напряжения.
В отличие от технологий, рассмотренных выше, технология ПМДП основана на МДП-структурах, которые обеспечивают следующие преимущества по сравнению с биполярными:
Статья в тему
Схема дистанционного акустического светорегулятора
В
данной работе предлагается схема регулятора, который позволяет дистанционно при
помощи акустических звуков управлять нагрузками, например, светильниками,
двигателями и т.д. Исследования схемы позволит управлять нагрузками плавно, что
увеличит срок службы нагрузки. В будущем, собрав ...