Выбор двигателя и редуктора привода первого звена
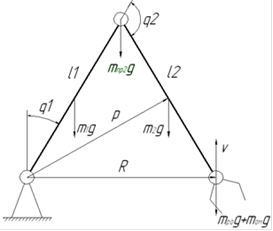
Рис 3. Схема манипулятора.
Скорость вращения первого звена ![]() определяется по формуле:
определяется по формуле:
![]()
где ![]() - скорость движения рабочего органа, R - расстояние от оси вращения первого звена до рабочего органа:
Обнови свой список желаний сейчас
- скорость движения рабочего органа, R - расстояние от оси вращения первого звена до рабочего органа:
Обнови свой список желаний сейчас
![]() ,
,
где ![]() - определяется как отклонение "локтевого" звена от продольной оси "плечевого" звена.
- определяется как отклонение "локтевого" звена от продольной оси "плечевого" звена.
Угловое ускорение движения первого звена ![]() определяется по формуле:
определяется по формуле:
![]()
Силовой анализ манипуляционного механизма
Определяем момент сил, который должен развивать привод первого звена.
Суммарный момент сил ![]() , который должен развивать привод первого звена:
, который должен развивать привод первого звена:
![]()
где ![]() - статический момент сил относительно оси поворота первого звена (зависит от
- статический момент сил относительно оси поворота первого звена (зависит от ![]() ) ,
) , ![]() - динамический момент, действующий на первое звено,
- динамический момент, действующий на первое звено, ![]() - КПД механической передачи, принимаем
- КПД механической передачи, принимаем ![]() .
.
![]()
![]()
из п. 1.1.4 ![]() , из п. 1.1.5
, из п. 1.1.5 ![]() .
.
![]()
где ![]() - эквивалентный момент инерции манипулятора, перемещаемого первым приводом:
- эквивалентный момент инерции манипулятора, перемещаемого первым приводом:
![]()
где ![]() - расстояние от оси вращения первого звена до центра масс второго звена:
- расстояние от оси вращения первого звена до центра масс второго звена:
![]() .
.
Максимальное значение суммарного момента ![]() можно получить путем варьирования значениями переменных
можно получить путем варьирования значениями переменных ![]() . Рассмотрим положение рабочего органа, находящегося на горизонтальной линии, проходящей через ось вращения первого звена. Тогда:
. Рассмотрим положение рабочего органа, находящегося на горизонтальной линии, проходящей через ось вращения первого звена. Тогда:
 )
)
Достаточно изменять параметр ![]() , а параметр
, а параметр ![]() вычислять по приведенной выше формуле.
вычислять по приведенной выше формуле.
Оценка мощности механического движения первого звена
Для определения мощности механического движения первого звена используем формулу ![]() . Из результатов вычисления (табл. 3) находим значения, наиболее близкие к максимальным:
. Из результатов вычисления (табл. 3) находим значения, наиболее близкие к максимальным:
|
|
0 |
30 |
60 |
90 |
|
|
90 |
76.68 |
62.94 |
50,25 |
|
|
0.55 |
0.53 |
0.48 |
0.39 |
|
|
1.364 |
1.412 |
1.572 |
1.918 |
|
|
9.09 |
9.42 |
10.48 |
12.79 |
|
|
37.61 |
36.79 |
34.31 |
30.64 |
|
|
0.425 |
0.413 |
0.379 |
0.326 |
|
|
1.403 |
1.345 |
1.185 |
0.953 |
|
|
12.75 |
12.67 |
12.42 |
12.19 |
|
|
59.25 |
58.19 |
54.98 |
50.39 |
|
|
80.82 |
82.16 |
86.43 |
96.65 |
Статья в тему
Безопасность в Internet
Несанкционированный доступ к информации в компьютерных сетях превратился сегодня в одну из серьезнейших проблем, стоящих на пути развития телекоммуникационной среды и информационной инфраструктуры общества. Страны, где вычислительные системы и компьютерные сети проникли во все сферы человеческой дея ...