Выбор корректирующего устройства

Характеристическое уравнение

Корни характеристического уравнения
z1=-0.9987, z2=0.9987, z3=-0.9961, z4=0.9961, z5=-0.8207, z6=0.8207, z7=-0.8207, z8=0.8207
ЛАЧХ, ЖЛАЧХ, ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
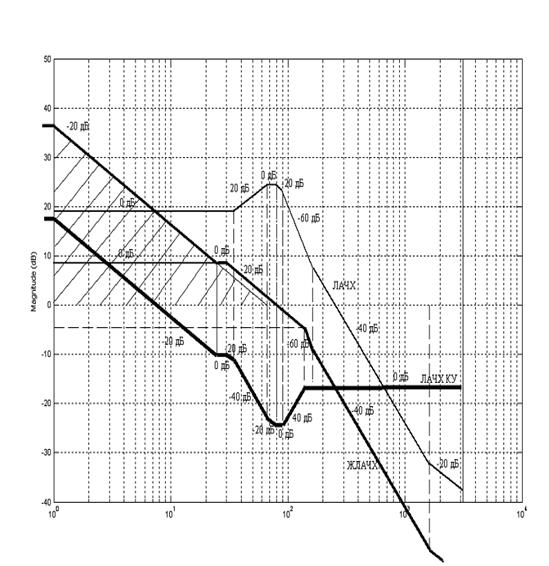
![]()
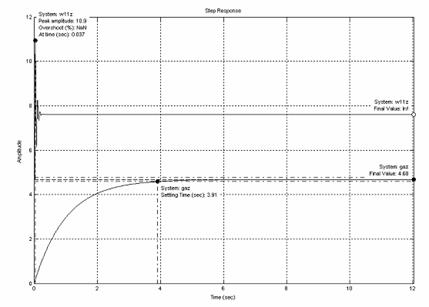
Псевдочастота рабочей точки
Амплитуда рабочей точки
![]()
ПОДБОР И РАСЧЁТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА

Перейти на страницу: 1 2
Статья в тему
Трассовый обзорный радиолокатор
Радиолокация - это область науки и техники,
объединяющая методы и средства обнаружения, измерения координат, а также
определение свойств и характеристик различных объектов, основанных на
использовании радиоволн.
В процессе радиолокационного наблюдения мы
получаем радиолокационную ...