Синтез САР из условия минимума резонансного максимума
Считая, что инерционность КРТ компенсировать нецелесообразно, спроектировать астатическую систему первого порядка, обеспечивающую заданную точность в установившемся режиме:
n=1c0=0c1=Tm
Решение.
Поскольку задан коэффициент ошибки с1, необходимо, чтобы коэффициент усиления разомкнутой системы
![]() . (*)
. (*)
Передаточная функция разомкнутой САР:
 ,
,
или, после пренебрежения инерционностью КРТ:
 .
.
Из последних формул видно, что
 . (**)
. (**)
Приравнивая (*) и (**), получаем, что
 ,
,
где ![]() - постоянная интегрирования разомкнутого контура регулирования скорости (КРС).
- постоянная интегрирования разомкнутого контура регулирования скорости (КРС).
В таком случае требуемая добротность САР по скорости будет обеспечена. При этом результирующая ПФ разомкнутого КРС:
 .
.
Построим ЛАЧХ разомкнутого КРС при ![]() .
.
Характеристический полином представим в виде:
![]() ,
,
где ![]() ,
,  ;
;
 .
.
ЛАЧХ разомкнутого КРС представлена на рис.9.17 (сплошная линия).
Будем решать задачу в такой постановке:
Синтезировать систему с требуемыми показателями по точности при условии, что заданное перерегулирование s=25%, а быстродействие будет максимальным. При решении задачи необходимо выполнить условие, что инерционность КРТ компенсироваться не будет, таким образом, желаемая ЛАЧХ в области высоких частот будет иметь такой же вид, как и ЛАЧХ неизменяемой части, т.е. наклон "-3".
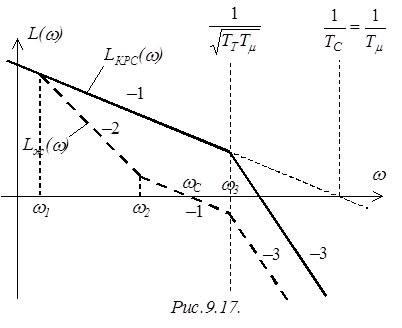
В соответствии с поставленной задачей перед синтезом желаемой ЛАЧХ примем, что частота среза wС будет находиться левей частоты сопряжения  , и будет сопрягаться с низко - и высокочастотными участками ЛАЧХ при наклонах "-2" и "-3" соответственно (рис.9.17, прерывистая линия). Значения wС и частот сопряжения w1, w2 пока неизвестны.
, и будет сопрягаться с низко - и высокочастотными участками ЛАЧХ при наклонах "-2" и "-3" соответственно (рис.9.17, прерывистая линия). Значения wС и частот сопряжения w1, w2 пока неизвестны.
Тогда задача сводится к задаче 2.
Дано:
Мр=1+s =1,25;
 ;
;
 .
.
Необходимо определить wС и ![]() . По величине Мр из графика рис.9.15 определяем
. По величине Мр из графика рис.9.15 определяем  , отсюда
, отсюда
 .
.
Из вида желаемой ЛАЧХ следует, что
![]() .
.
По значению Мр из графика рис.9.15 определяем ![]() , отсюда
, отсюда
Например, при ![]() с:
с:
![]() с
с![]() с-1
с-1![]() с-1.
с-1.
Таким образом, чтобы обеспечить желаемую ЛАЧХ, необходимо в регулятор скорости внести одно апериодическое звено и одно форсирующее звено 1-го порядка. Тогда ПФ регулятора скорости:
Статья в тему
Ёмкостные уровнемеры
Техника конструирования и применения датчиков (сенсорика) развилась в
самостоятельную ветвь измерительной техники. С ростом автоматизации к датчикам
физических параметров стали предъявляться все более высокие требования. При
этом особое значение придается следующим показателям:
* м ...