Синтез систем с последовательной коррекцией
|
|
 T=RC
T=RC
|
|
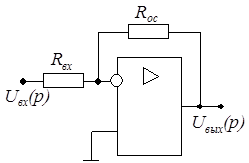
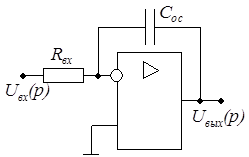
При помощи рассмотренной схемы включения ОУ (рис.9.12) могут быть реализованы основные (простейшие) типы корректирующих звеньев (регуляторов):
|
П-регулятор |
| ||
|
И-регулятор |
|

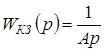
 A= - RвхСос
A= - RвхСос ПИ-регулятор 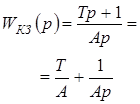
 T=Toc=RocCoc
T=Toc=RocCoc
|
A= - RвхСос |
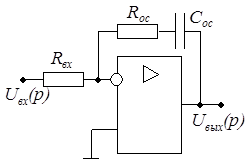
Настройка параметров корректирующих звеньев выполняется в следующей последовательности. Вначале, как правило, задаются величиной емкости конденсатора (0,10…0,25 мкФ), после чего вычисляют требуемое значение активных сопротивлений (3…300 кОм). Точная настройка обеспечивается за счет использования регулируемых сопротивлений (рис.9.13) с настроечным коэффициентом a (a=0…1).
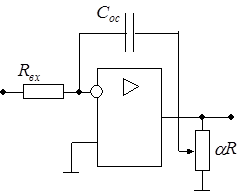
Рис.9.13. Схемы настройки
Возможно также использование для задания исходного сигнала неинвертирующего входа ОУ (рис.9.14).
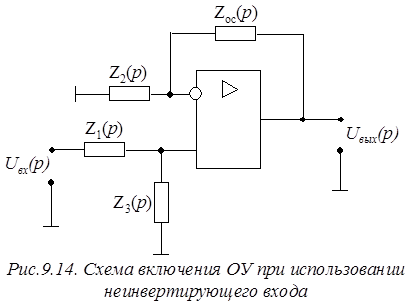
В этом случае ПФ корректирующего звена определяется по выражению:
 .
.
В частном случае, когда ![]() отсутствует (
отсутствует (![]() ), выражение принимает вид:
), выражение принимает вид:
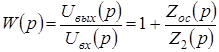 ,
,
т.е. не зависит от величины и характера соединения, установленного на неинвертирующем входе ОУ.
Статья в тему
Параметрический синтез антенны базовой станции по заданным требованиям к диаграмме направленности
Антенной
называется радиотехническое устройство, предназначенное для изучения или приема
электромагнитных волн. Антенна является одним из важнейших элементов любой
радиотехнической системы, связанной с излучением или приемом радиоволн. К таким
системам относят: системы радиосвязи, ра ...