Синтез систем с последовательной коррекцией
Содержание синтеза последовательных корректирующих звеньев
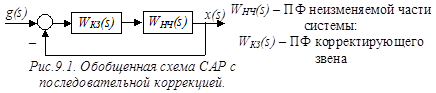
Обобщенная структурная схема САР с последовательной коррекцией представлена на рис.9.1
Помимо неизменяемой части САР (объекта регулирования) присутствует часть, параметры которой можно выбрать, - корректирующее звено.
Частотная характеристика разомкнутой системы:
![]()
ЛАЧХ разомкнутой системы:
![]() .
.
Назовем систему, которая обеспечивает заданные динамические и статические свойства, - желаемой, а ЛАЧХ желаемой системы в разомкнутом состоянии - желаемой ЛАЧХ:
![]() .
.
Проектируемая система будет удовлетворять заданным требованиям, если ЛАЧХ разомкнутой системы будет равна желаемой ЛАЧХ:
![]() .
.
Следовательно, желаемую САР можно синтезировать за счет выбора соответствующей ПФ корректирующего звена.
Синтез системы с последовательной коррекцией включает:
) Синтез желаемой ЛАЧХ Lж (w);
) Определение ЛАЧХ корректирующего звена LКЗ (w) и его ПФ WКЗ (s);
) Реализацию некоторого устройства с ПФ WКЗ (s).
Синтез желаемой ЛАЧХ, в свою очередь, включает в себя три этапа:
· синтез низкочастотной ЛАЧХ;
· синтез среднечастотной ЛАЧХ;
· синтез высокочастотной ЛАЧХ.
Синтез низкочастотной ЛАЧХ
Низкочастотная ЛАЧХ в основном определяет точность работы САР в установившихся режимах. Таким образом, ее синтез может быть выполнен на основании требований к системе по точности.
Предположим, что речь идет о статической САР (порядок астатизма разомкнутой системы n=0). Тогда
![]() ,
,
где ![]() - нормированная ПФ.
- нормированная ПФ.
Установившаяся ошибка в статической системе при отработке скачкообразного воздействия ![]() :
:
![]() .
.
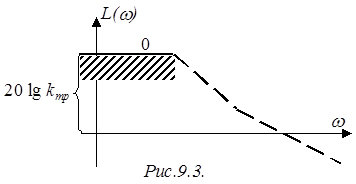
Отсюда с учетом требований системы по точности можно определить требуемое значение коэффициента усиления kтр. Синтезированная низкочастотная ЛАЧХ в этом случае имеет наклон 0, как показано на рис.9.3.
Разумеется, что низкочастотная ЛАЧХ синтезируемой САР не должна заходить в запретную зону (заштрихована), поскольку при этом k<kтр, и ошибка будет превышать требуемое значение.
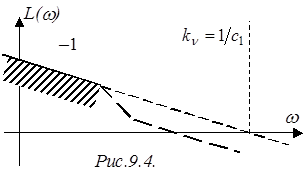
Рассмотрим астатическую САР 1-го порядка (n=1).
В этом случае задают требуемое значение коэффициента ошибки с1, и определяют требуемую добротность САР по скорости, равную коэффициенту усиления разомкнутой системы:
![]() .
.
Зная ![]() , можно синтезировать низкочастотный участок ЛАЧХ (рис.9.4). Низкочастотная ЛАЧХ синтезируемой САР не должна заходить в запретную зону (заштрихована), поскольку в этом случае коэффициент ошибки с1 будет превышать заданное значение.
, можно синтезировать низкочастотный участок ЛАЧХ (рис.9.4). Низкочастотная ЛАЧХ синтезируемой САР не должна заходить в запретную зону (заштрихована), поскольку в этом случае коэффициент ошибки с1 будет превышать заданное значение.
Статья в тему
Электромеханический следящий привод робота
Разработать
электромеханический следящий привод «плечевой» степени подвижности двухзвенного
плоского манипулятора робота, кинематическая схема которого изображена на рис.
1.
Рис
1. Расчётная кинематическая схема манипуляционного механизма.
Основные
технические требова ...