Пример решения задачи синтеза управления при изготовлении кулачка
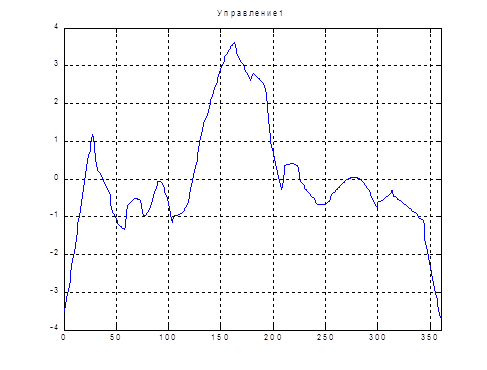
Рисунок 6.13 График управляющего воздействия для первого сочленения
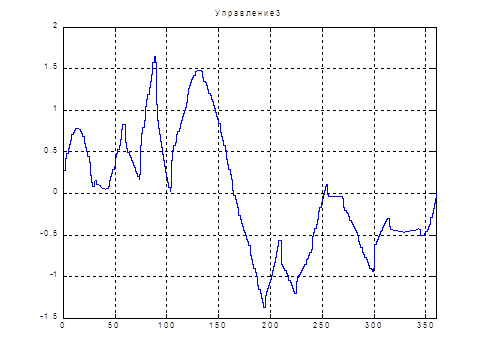
Рисунок 6.14 График управляющего воздействия для третьего сочленения
Из графиков следует, что значения управляющих воздействий не выходят за допустимые пределы.
С помощью разработанной программы, представленной в приложении А, получены реальные процессы. Моделирование показывает, что отклонение реальных процессов в системе управления от эталонных незначительное. Величина отклонения реального процесса от эталонного на каждом шаге квантования приведены на листе 8 графической части.
Управление ПР при вертикальном движении
При опускании и поднятии РО изменяется только вторая обобщенная координата. Первая и третья обобщенные координаты не меняются. Это связано с тем, что рабочий орган двигается только вертикально. Для вертикального движения необходимо обеспечить высокую скорость с целью уменьшения затрат времени. Траектория движения будет разбита на три интервала:
интервал разгона от нулевой скорости к максимальной;
интервал движения с максимальной скоростью;
интервал торможения.
Максимальная скорость для второго сочленения равна 0,7 м/с.
Интервал разгона характеризуется линейным увеличением скорости с постоянным ускорением. Для обеспечения минимальной длительности интервала разгона необходимо максимально возможное ускорение во втором сочленении. Количество шагов квантования для интервала разгона:
![]()
Длительность интервала торможения равна длительности интервала разгона.
Во время интервалов разгона и торможения РО опустится на величину

Необходимо опускание осуществить на величину 0,2 м, то на интервале движения с максимальной скоростью необходимо переместится на величину 0,2-0,116=0,084 м.
Таким образом, интервал движения с максимальной скоростью длится 6 шагов квантования. График эталонной обобщенной координаты приведен на рисунке 6.15. График эталонной обобщенной скорости приведен на рисунке 6.16. График эталонного момента приведен на рисунке 6.17
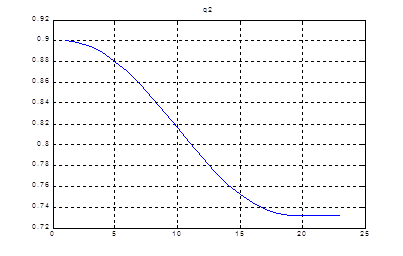
Рисунок 6.15 График второй обобщенной координаты
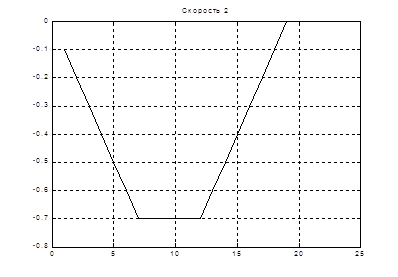
Рисунок 6.16 График обобщенной скорости для второго сочленения
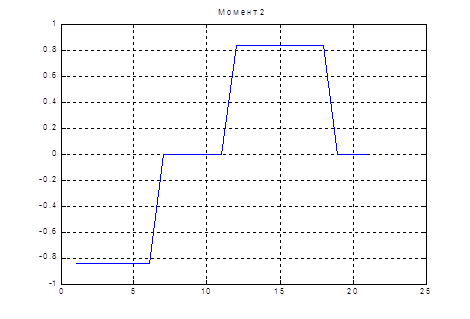
Рисунок 6.17 График момента для второго сочленения
С помощью разработанной программы, представленной в приложении А, осуществлен синтез управляющего воздействия для второго сочленения. График приведен на рисунке 6.18
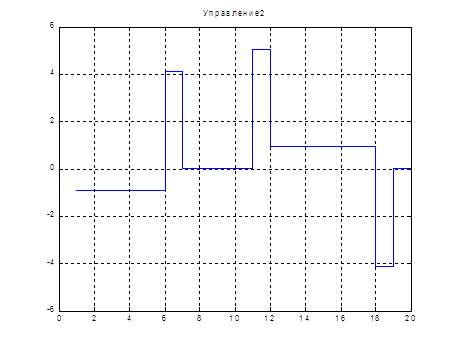
Рисунок 6.18 График управляющего воздействия для второго сочленения
Статья в тему
Усилитель импульсный
В настоящее время наблюдается стремительный рост приборов, работающих не с аналоговыми сигналами, а именно с импульсными. Преобладающее применение импульсных устройств обусловлено их высоким КПД, более высокой точностью, меньшей критичностью к изменению температуры, большей помехоустойчивостью. В св ...