Пример решения задачи синтеза управления при изготовлении кулачка
Управление ПР при движении вдоль контура кулачка при лазерной резке
Для обеспечения движения по контуру кулачка требуется знать координаты точек положения рабочего органа ПР в моменты дискретизации по времени. Для обеспечения высокой точности количество моментов дискретизации должно быть больше, чем количество узловых точек. Поэтому по узловым точкам необходимо построить кубический сплайн [24], а затем на сплайне выбрать равноотстоящие точки, в которые рабочий орган должен попадать в моменты квантования по времени (через каждые 1 градус друг от друга).
Контур кулачка графическими средствами MathCAD изображен на рисунке 6.4
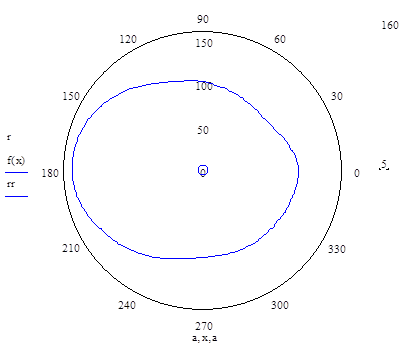
Рисунок 6.4 Контур кулачка
Для синтеза управления осуществим пересчет координат точек из полярной системы координат в декартовую систему координат, связанную с основанием робота. Для этого необходимо выбрать местоположение кулачка в рабочей зоне. Поскольку в различных точках манипулятор обеспечивает различную точность позиционирования, то необходимо расположить кулачок в области рабочей зоны, где обеспечивается требуемая точность. Для выбранной конфигурации робота точность выше в тех точках, которые находятся ближе к оси вращения первого сочленения.
Таким образом, расположим кулачок как можно ближе к оси вращения первого сочленения. При этом кулачок необходимо сориентировать так, чтобы минимизировать расстояние от оси вращения первого сочленения до самой дальней точки на контуре кулачка.
Пусть центр вращения кулачка (полюс полярной системы координат) будет расположен на оси X системы координат робота на расстоянии 500 мм от его начала. Направим полярную ось вдоль оси Х системы координат робота. Расположим плоскость кулачка параллельно плоскости OXY системы координат робота.
Таким образом, узловая точка с координатами ![]() и
и ![]() в полярной системе координат имеет следующие координаты в декартовой системе, связанной с основанием робота.
в полярной системе координат имеет следующие координаты в декартовой системе, связанной с основанием робота.
![]() ;
;
![]() ;
;
![]() .
.
Рисунок 6.5 Положение кулачка в рабочей зоне
Последовательность полученных точек представляет собой желаемые положения РО в моменты квантования. Для нахождения эталонного обобщенного положения, то есть первой, третьей и пятой компонент вектора состояния решается обратная задача кинематики о положениях по формулам (4.1). Графики первой и третьей обобщенных координат приведены соответственно на рисунке 6.7 и рисунке 6.8. Для нахождения эталонных обобщенных скоростей осуществим решение обратной задачи кинематики о скоростях. На рисунке 6.9 и 6.10 приведены графики первой и третьей обобщенных скоростей.
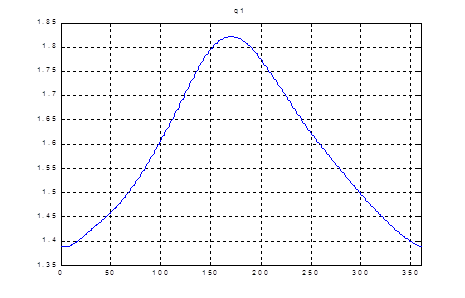
Рисунок 6.7 График первой обобщенной координаты
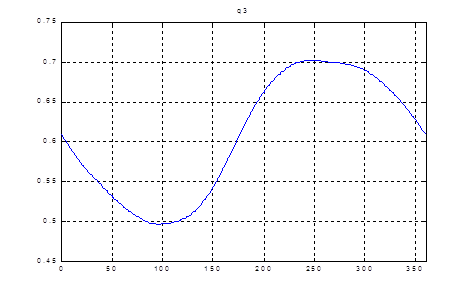
Рисунок 6.8 График третьей обобщенной координаты

Рисунок 6.9 График обобщенной скорости первого сочленения
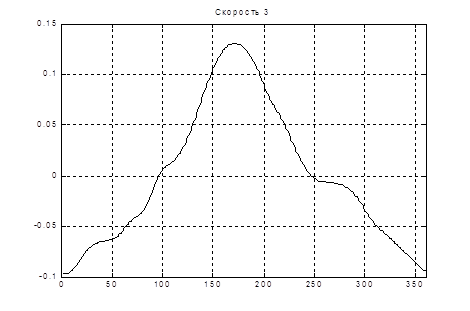
Рисунок 6.10 График обобщенной скорости для третьего сочленения
На рисунке 6.11 и 6.12 приведены графики эталонных моментов в двигателях первого и третьего сочленений.
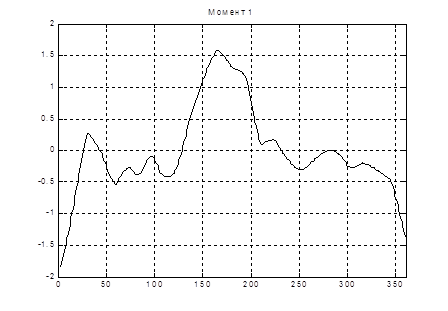
Рисунок 6.11 График момента для первого сочленения
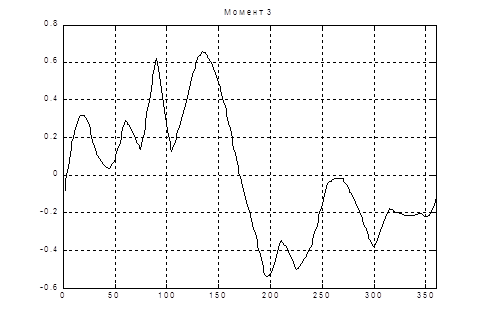
Рисунок 6.12 График момента для третьего сочленения
При движении вдоль контура кулачка меняются только первая и третья обобщенные координаты. Вторая координата не меняется. Это связано с тем, что рабочий орган двигается в горизонтальной плоскости. В связи с этим все эталонные процессы во втором сочленении равны нулю и графики не приведены.
В результате синтеза получены управляющие воздействия, графики которых приведены на рисунке 6.13 и рисунке 6.14 соответственно для первого и третьего сочленений.
Статья в тему
Трасса прокладки волоконно-оптической линии передачи между пунктами Орел-Пенза
В
современном информационном мире каждые пять лет объём передаваемой информации
увеличивается вдвое, соответственно, встаёт задача передачи большого количества
информации с максимальной скоростью и высокой степенью достоверности на большие
расстояния и её обработка.
Ведущая
р ...