Расчет передаточной функции системы. Определение устойчивости
Для используемого в системе микропроцессора:
![]() .
.
Проведём z-преобразование, учитывая период дискретизации. Период дискретизации Т0 задается, считается, что чем меньше Т0, тем лучше, но из-за неоправданного уменьшения Т0 резко возрастает сложность системы. Рекомендуется выбирать Т0=1/20Тmin. Для проектируемой системы Т0=0,01 сек.
Z-преобразование, проводится по формулам [14].
 (74)
(74)
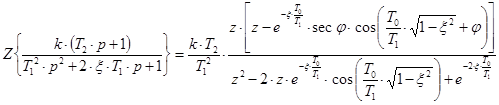 (75)
(75)
где 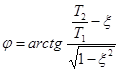 .
.
Тогда передаточная функция замкнутой САУ в форме z-преобразований запишется в виде:
![]() (76)
(76)
Перейдем к псевдочастоте, сделав подстановку:
![]() ,
,
где ![]() .
.
Тогда, преобразовав в программе Mathcad выражение (76), получим передаточную функцию для замкнутой системы с учетом микропроцессора:
![]() (77)
(77)
Характеристическое уравнение:
![]()
![]() (78)
(78)
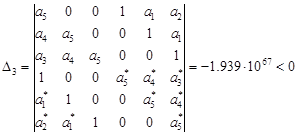
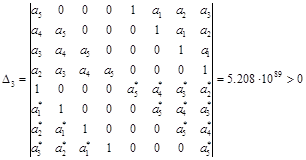
Определитель Шур - Кона имеет вид:
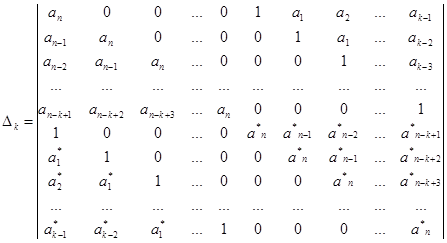
Для устойчивости системы необходимо, чтобы все нечетные определители были меньше 0, а все четные - больше 0.
Составим и вычислим, используя программу Mathcad, четные и нечетные определители Шур-Кона.

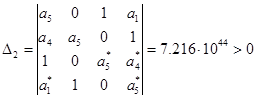
Вывод: так как ![]() ,
, ![]() ,
, ![]() ,
, ![]() , следовательно, САУ управления громкостью звука с учетом микропроцессора является устойчивой.
, следовательно, САУ управления громкостью звука с учетом микропроцессора является устойчивой.
Статья в тему
Строительство волоконно-оптической линии связи на участке Чулым–Колывань
Опыт строительства ВОЛС в России и странах СНГ выявил ряд существенных отличий в организации, технологии поведения линейных и монтажных работ по сравнению с работами на традиционных электрических кабелях связи. Эти отличия в значительной степени обусловлены тем, что у ОК в отличие от электри ...