Формирователь сигнала главной обратной связи и чувствительный элемент
![]() .
.
.4 Регулятор скорости
Вид и параметры регулятора скорости определены ТЗ (см. табл. 5). Это пропорциональное звено с передаточной функцией
![]()
.5 Регулятор напряжения (тока)
Вид и параметры регулятора напряжения (тока) определены ТЗ (см. табл. 5). Это изодромное звено с передаточной функцией
![]() ,
,
где, ![]()
.6 Усилитель мощности
В качестве усилителя мощности используется тиристорный преобразователь. Предусмотрены два варианта его исполнения:
1) управляемый выпрямитель (УВ) (ЭП ПР «Универсал-5»);
2) широтно-импульсный модулятор (ШИМ) (ЭТШМ-0,5).
Передаточная функция тиристорного преобразователя определяется в виде апериодического звена с чистым запаздыванием ![]()
![]() ,
,
где ![]() .
.
Коэффициент передачи преобразователя определяется
![]() ,
,
![]() - из таблицы 3.
- из таблицы 3.
Постоянная времени преобразователя находится по выражению, с
![]() .
. ![]() .
.
Чистое запаздывание обусловлено физическими особенностями работы тиристорных преобразователей обеих типов. Для преобразователя типа УВ чистое запаздывание, с ![]() , где f - частота питания преобразователя (табл. 4);
, где f - частота питания преобразователя (табл. 4);![]() n - число фаз (табл. 4).
n - число фаз (табл. 4).
![]() .
. ![]() .
.
Для рассматриваемых видов преобразователей чистое запаздывание можно представить в виде дополнительной составляющей в постоянной времени этого звена [3]. Тогда ПФ принимает вид
![]() ,
,
.7 Исполнительный двигатель
В качестве исполнительного двигателя используется двигатель постоянного тока с независимым возбуждением из серии 4ПО. Технические данные двигателя 4ПО80В1
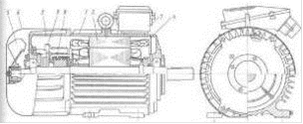
Рис.6. Двигатель постоянного тока унифицированной конструкции типа 4ПО.
-корпус; 2-магнитопровод статора; 3-щит подшипниковый передний; 4-сердечник якоря; 5-вентилятор; 6-кожух; 7-коробка выводов; 8-коллектор; 9-траверса.
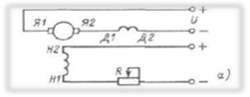
Рис.7. Системы возбуждения машин постоянного тока: независимая.
При независимой системе возбуждения обмотка возбуждения питается от постороннего источника постоянного тока и ток возбуждения не зависит от режима и нагрузки машины. Генераторы с независимой системой возбуждения допускают регулирование напряжения практически от нуля до номинального. Изменение напряжения при увеличении нагрузки определяется только размагничивающим действием реакции якоря и увеличением падения напряжения на сопротивлении якорной цепи.
|
Типоразмер двигателя |
Номинальная мощность, кВт, при исполнении |
Напряжение, В |
Ток якоря, А, при исполнении |
Номинальная частота вращения, об/мин |
|
4ПО80В1 |
1,6 |
220 |
6,8 |
1500 |
Статья в тему
Структурные схемы надежности
Расчёты надёжности - это расчёты, предназначенные для определения
количественных показателей надёжности.
На этапе проектирования расчёт надёжности проводится с целью
прогнозирования надёжности проектируемой системы.
На этапе испытаний и эксплуатации расчёт надёжности проводится д ...