Анализ ARC-цепи
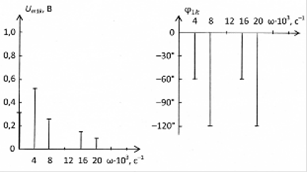
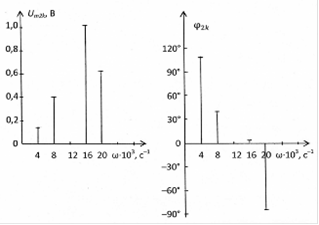
На рис. 1.7 представлены графики спектров амплитуд и фаз входного (а) и выходного (б) напряжений.
 а)
а)
 б)
б)
Рис. 1.7
Статья в тему
Способы и информационные технологии получения знаний
Наступивший XXI век станет этапным для проникновения новых информационных технологий и создаваемых на их основе высокопроизводительных компьютерных систем во все сферы человеческой деятельности - управление, производство, науку, образование и т.д. Конструируемые посредством этих технологий интеллект ...