Анализ ARC-цепи
. Выбрать для своего варианта ARC-цепь из табл.1.2 и рассчитать значения её параметров для числа M.
. Найти операторную передаточную функцию ARC-цепи типа H(p)=U2(p)/U1(p).
3. Получить комплексную передаточную функцию H(jω) путём замены переменной p=jω в H(p). Записать выражения для амплитудно-частотной H(ω)=|H(jω)| и фазочастотной (ω)=argH(jω) характеристик. Построить графики АЧХ и ФЧХ в диапазоне частот 0…![]()
![]() При использовании ПК рекомендуется выбирать fmin=1 Гц и fmax таким, чтобы на графиках отображались характерные качества АЧХ и ФЧХ исследуемой ARC-цепи. Обычно, fmax=5…100 кГц.
При использовании ПК рекомендуется выбирать fmin=1 Гц и fmax таким, чтобы на графиках отображались характерные качества АЧХ и ФЧХ исследуемой ARC-цепи. Обычно, fmax=5…100 кГц.
. Найти переходную характеристику цепи h(t) по операторной передаточной функции H(p). Построить график h(t) при изменении времени от 0 до ![]()
![]() При использовании ПК рекомендуется выбирать tmin= 1 нс, а время tmax - таким, чтобы было чётко видно установившееся значение h(t). Обычно, tmax= 0,1…5 мс. По рассчитанному графику переходной характеристики цепи h(t) определить период свободных колебаний Tсв и частоту свободных колебаний fсв (ωсв=2πfсв), а также декремент затухания
При использовании ПК рекомендуется выбирать tmin= 1 нс, а время tmax - таким, чтобы было чётко видно установившееся значение h(t). Обычно, tmax= 0,1…5 мс. По рассчитанному графику переходной характеристики цепи h(t) определить период свободных колебаний Tсв и частоту свободных колебаний fсв (ωсв=2πfсв), а также декремент затухания ![]()
![]() =h(t1)/h(t1+Tсв), где t1 - значение времени при максимальном значении переходной характеристики (h(t1)=max h(t)).
=h(t1)/h(t1+Tсв), где t1 - значение времени при максимальном значении переходной характеристики (h(t1)=max h(t)).
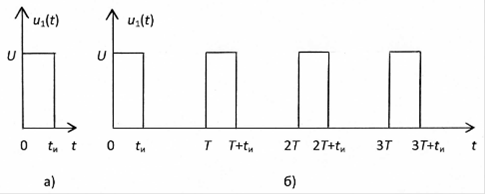
. Получить выражения для комплексных спектральных плотностей напряжения на входе U1(jω) и выходе U2(jω) цепи, если на вход поступает прямоугольный видеоимпульс напряжения с амплитудой U и длительностью tи (рис. 1.1,а). Рассчитать и построить график спектральной плотности амплитуд напряжения |U1(jω)| прямоугольного импульса, у которого амплитуда U=1 В, а длительность равна tи=3,6∙Tсв/N, мс. Также построить графики АЧХ=|H(jω)| и спектральной плотности амплитуд напряжения на выходе цепи |U2(jω)|=|U1(jω)|∙|H(jω)|. Графики строить в интервале частот 0![]()
![]() 0 с шагом 0,2ω0, где ω0=2π/tи.
0 с шагом 0,2ω0, где ω0=2π/tи.
. Найти реакцию цепи u2(t) при воздействии на ARC-цепь периодической последовательности прямоугольных видеоимпульсов (рис. 1.1,б).
 =1 В, n=6, T=0,1(N+M)π, мс
=1 В, n=6, T=0,1(N+M)π, мс
Рис. 1.1
Таблица 1.1
|
Вариант |
|
Номер гармоники | |||||||
|
к |
0 |
1 |
2 |
3 |
4 |
5 |
6 | ||
|
Ur1 |
0,167 |
0,318 |
0,274 |
0,212 |
0,138 |
0,063 |
0 | ||
|
Д |
6 |
|
- |
|
|
|
|
|
- |
Решение
В соответствии с номером варианта Д и значением N=1 М=5 выбираем схему расчета
Рисунок 1.2 -Схема цепи
|
№ |
Схема ARC-цепи |
Параметры |
Статья в тему
Анализ электромагнитных реле
электромагнитный реле однофазный питание
Основные
направления экономического и социального развития предусматривают интенсивное
развитие автоматизации и роботизации всего народного хозяйства страны,
повышение энерговооруженности труда.
Решение
этих задач непосредственно связано с с ...