Непрерывное излучение
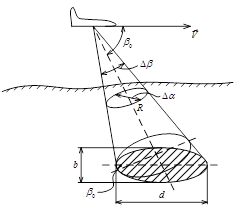
Основные геометрические соотношения для этого режима представлены на рисунке:
Мощность сигнала на входе РЛС определяется формулой:
![]()
В отличие от точечной цели здесь при заданной ширине луча эффективная поверхность рассеяния sпл зависит от расстояния до поверхности. Используя зависимость sпл=s0Sпл, обозначим единым коэффициентом все неизменяемые параметры радиолокатора и поверхности
![]()
и определим Sпл=f(R).
В общем случае наклонного облучения поверхности с расстояния R под углом b0 с широкой ДН в плоскости полета Db, а в нормальной к ней плоскости Da, облучаемая площадь будет иметь форму эллипса с большой осью d и малой b.
Из рисунка ясно, что d=RDb/sinb0; b=RDa.
Площадь эллипса пропорциональна квадрату расстояния
![]() ,
,
где ![]() .
.
Отсюда ![]() .
.
В отличие от точечной цели мощность отраженного поверхностью непрерывного сигнала на входе РЛ ПРМ убывает второй степенью расстояния.
Статья в тему
Комбинационная схема управляющая семисегментным индикатором
Микроэлектроника
- это современная квинтэссенция электроники, в которой ее информационные
свойства достигают максимума, то есть плотность потоков информации на единицу
веса намного превосходят таковую в остальной электронике, а тем более в электротехнике.
Задача микроэлектроники - су ...