Построение и расчет зоны устойчивости
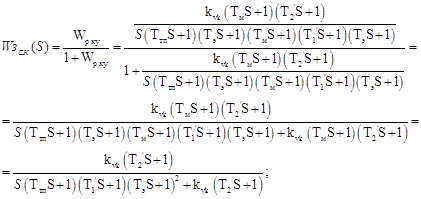
Для расчёта необходимо знать передаточную функцию скорректированной замкнутой системы. Получим её зная передаточную функцию скорректированной разомкнутой системы:
![]()
![]()
![]() (103)
(103)
Найдем передаточную функцию замкнутой скорректированной системы:
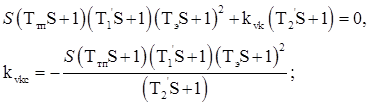
Прировняем знаменатель к нулю и найдем чему равен коэффициент усиления скорректированной замкнутой системы:
 (106)
(106)
Заменяем S→jω:
 (107)
(107)
Умножим числитель и знаменатель на комплексно-сопряженное число:
 (108)
(108)
Раскроем скобки и введем обозначения учитывая что
![]() :
:
![]() (109)
(109)
где
А5=![]()
А4=![]()
А3=![]()
А2=![]()
![]()
![]() (110)
(110)
 (111)
(111)
 (112)
(112)
В пакете Mathcad строим зависимость V(ω) от U(ω) (рис. 10).Область устойчивости находится слева от кривой. Из этой зависимости можно определить, что предельный коэффициент данной системы равен Кпр = 184.
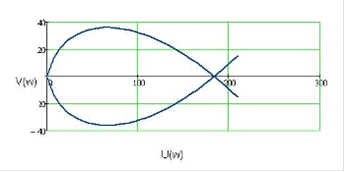
Рисунок 10 - Зона устойчивости в среде MathCAD для Кvk
Выполненные расчеты D-разбиения позволяют установить предельный коэффициент усиления Кгр = 186. С учетом запаса устойчивости Азап=11,3, коэффициент усиления kvk =50 с-1 входит в зону рекомендуемых значений для разомкнутой системы.
В пакете Mathcad строим зависимость U(ω) от V(ω) (рис. 10). Область устойчивости находится слева от кривой. Из этой зависимости можем определить, что граничный коэффициент данной системы равен Кгр=600. С учетом запаса устойчивости выделим область устойчивости D(n;0), где n=4 (по наивысшему показателю степени).
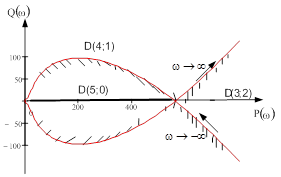
Рисунок 10 - Характеристика D-разбиения
Вывод
В данной курсовой работе была исследована замкнутая электромеханическая система автоматического управления, работа которой основана на использовании принципа регулирования по отклонению. Устойчивость системы была исследована четырьмя методами: по критерию Гурвица, который позволяет получить только качественное суждение о характере процесса регулирования, по критерию Найквиста (с помощью построения АФЧХ),по критерию Михайлова и логарифмическому критерию. Система оказалась устойчивой, но имела маленькие запасы устойчивости. Затем были построены желаемая ЛАЧХ системы и ЛАЧХ корректирующего устройства. После чего было разработано корректирующее устройство, которое обеспечило устойчивость исследуемой системы с необходимыми запасами по фазе и амплитуде.
В результате были получены основные показатели качества скорректированной системы: перерегулирование, время первого согласования, время достижения первого максимума и время регулирования.
Статья в тему
Демаскирующие признаки сигналов
Информационная безопасность, как и защита информации, задача комплексная, направленная на обеспечение безопасности, реализуемая внедрением системы безопасности.
Проблема защиты информации является многоплановой и комплексной и охватывает ряд важных задач. Проблемы информационной безопасности постоя ...