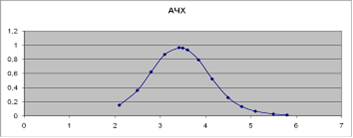
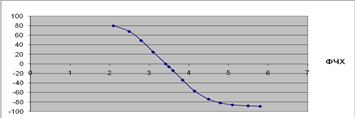
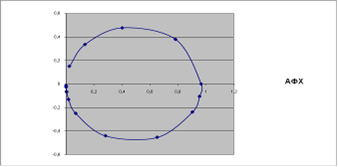
Частотные характеристики электрических цепей
напряжение амплитудный частотный частота
Статья в тему
Строительство волоконно-оптической линии связи на участке Чулым – Колывань
Опыт строительства ВОЛС в России и странах СНГ выявил ряд существенных отличий в организации, технологии поведения линейных и монтажных работ по сравнению с работами на традиционных электрических кабелях связи. Эти отличия в значительной степени обусловлены тем, что у ОК в отличие от электрических к ...