Предварительные результаты его тестирования
Широко распространено мнение, что приемник ГЛОНАСС (или совмещенный приемник GPS/ГЛОНАСС) сложнее из-за используемого в ГЛОНАСС частотного разделения сигналов. Это мнение, по крайней мере, неточно. Правильнее утверждать, что повышенная сложность совмещенного приемника GPS/ГЛОНАСС определяется главным образом отличием частотного диапазона сигналов стандартной точности двух СРНС: для GPS это прежде всего L1=1575.42 МГц, а для ГЛОНАСС - это 14 частот в диапазоне 1602 МГц. В рассматриваемой архитектуре приемника требование приема второго частотного диапазона приводит к появлению второго РЧП и второго тракта обработки отсчетов в ЦНП, включая отдельный буфер памяти для хранения отсчетов. Добавленное для этого оборудование в ЦНП составляет примерно 5-6% от общей площади кристалла. В то же время добавленный цифровой тюнер частотного разделения составляет всего 0,7% от общей площади кристалла ЦНП.
Подробное изучение преимуществ двухсистемного приемника СРНС должно стать предметом дальнейших исследований. В данной статье приводится только несколько примеров сравнения работы приемника в режиме только GPS и совмещенном режиме GPS/ГЛОНАСС, полученных в ходе предварительных испытаний создаваемого приемника. Идентичность условий для двух режимов обеспечивалась записью оцифрованных отсчетов с выходов РЧП и последующим воспроизведением и постобработкой этих отсчетов цифровой частью приемника, работающей соответственно в односистемном или совмещенном режиме. Следует отметить, что использовавшаяся версия программного обеспечения не была предназначена для приема сверхслабых сигналов (отношение мощности несущей принимаемых сигналов к спектральной мощности шума C/N0 ниже 13 дБГц).
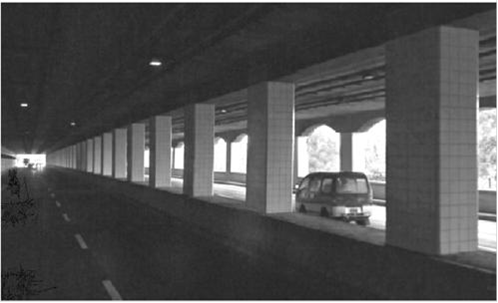
Рис. 5 - Автомобильный тоннель на острове Тайвань
Первая часть испытаний проводились на территории о. Тайвань, в том числе при езде в тоннеле, одна из стен которого закрыта не полностью (рис. 5). При проезде вдоль сплошной стены навигационные определения практически отсутствовали в режиме как GPS, так и GPS/ГЛОНАСС. Проезд в обратном направлении вдоль полуоткрытой стены (от наблюдателя) представляет собой тот случай, когда двухсистемный режим GPS/ГЛОНАСС демонстрирует очевидные преимущества.
На рис. 6 приведены траектории местоопределений для двух режимов. Автомобиль двигался справа налево. Длина тоннеля - около 2200 м, время проезда тоннеля чуть менее 2 мин (110-112 с). Начало траекторий соответствует моменту въезда в тоннель. В режиме GPS слежение за достаточным количеством сигналов (3-4) и местоопределение продолжается еще около 25 с после въезда в тоннель. Примерно в начале последней трети траектории есть второй участок с успешным местоопределением продолжительностью 10 с. В режиме GPS/ГЛОНАСС местоопределение имело место в течение всего проезда.
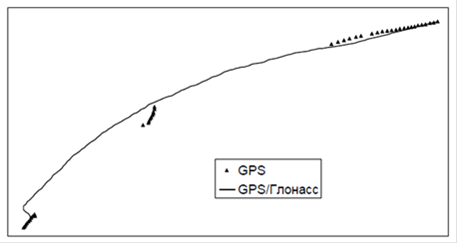
Рис. 6 - Траектории местоопределений при работе по GPS и GPS/ГЛОНАСС в тоннеле
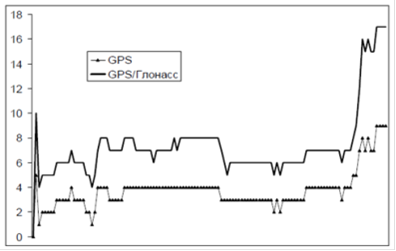
Рис. 7 - Количество сигналов КА СРНС GPS и GPS+ГЛОНАСС, принимавшихся при проезде тоннеля
Во время указанного проезда в тоннеле на выбранном для анализа 30-секундном участке отношение мощности несущей принимаемых сигналов к спектральной мощности шума C/N0 составляло от 16 до 30 дБГц, в среднем -22,1 дБГц. Графики изменения количества сигналов, по которым осуществлялись навигационные измерения, приведены на рис. 7. При работе в режиме GPS количество принимаемых сигналов бóльшую часть времени составляло 2-3, что недостаточно для трехмерной навигации, а на интервалах приема 4 сигналов GPS геометрический фактор по большей части был неудовлетворительным. В режиме GPS/ГЛОНАСС почти все время проезда в тоннеле принималось от пяти до восьми сигналов СРНС, что обеспечило возможность определять координаты непрерывно. В то же время отмеченный низкий уровень мощности принимаемых сигналов свидетельствует о том, что практически все они претерпевали многолучевое распространение.
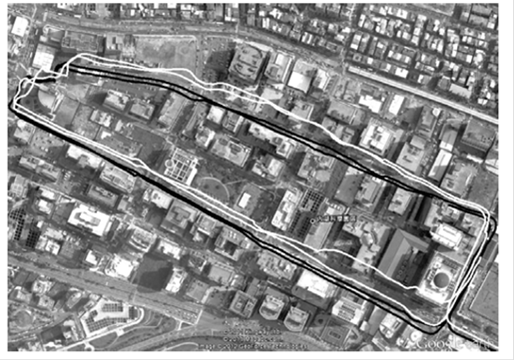
Рис. 8 - Траектории в двух режимах: GPS (белая), и GPS+ГЛОНАСС (черная)
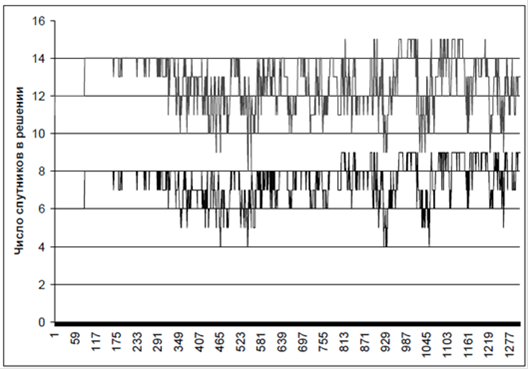
Рис. 9 - Количество КА в навигационном решении для двух режимов работы: верхний график − ГЛОНАСС/GPS, нижний график - GPS
На рис. 8 и 9 представлены траектории проезда и количество КА в навигационном решении во время второй серии испытаний, проводившихся также на территории о. Тайвань, в двух режимах работы приемника: в режиме GPS и в совмещенном режиме GPS/ГЛОНАСС. Результаты иллюстрируют повышение точности местоопределений в совмещенном режиме GPS/ГЛОНАСС в условиях плотной городской застройки. Очевидным объяснением причины повышения точности служит почти двукратное увеличение числа КА, используемых в навигационном решении.
Статья в тему
Мультисервисная телекоммуникационная сеть общего пользования
телекоммуникационная сеть радиорелейная телефонная
Мультисервисная сеть (МС) - это сеть связи, построенная в соответствии с концепцией NGN и обеспечивающая предоставление неограниченного набора услуг. В настоящее время появление новых сетевых технологий привело к появлению новых терминалов, обеспеч ...