Проектирование и особенности совмещенного GPS/ГЛОНАСС приемника
Кристаллы универсального радиочастотного преобразователя были изготовлены по нормам 0,11 мкм технологического процесса. При самостоятельном использовании кристалл размещался в корпусе QFN-32 размерами 5×5 мм. Возможно также использование корпуса FBGA-35 размерами 4×3 мм. Цифровой навигационный процессор - единый, одновременно обеспечивающий обработку сигналов как СРНС GPS, так и ГЛОНАСС. На рис. 2 приведена блок-схема кристалла ЦНП.
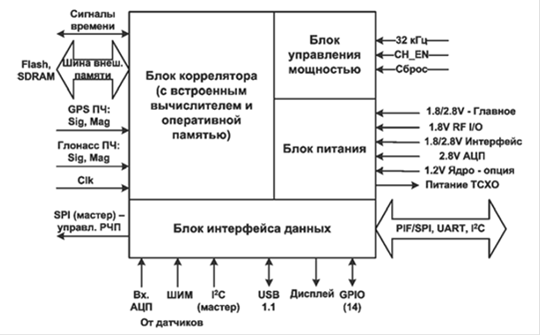
Рис. 2 - Блок-схема цифрового навигационного процессора
Основным в составе ЦНП является блок коррелятора, содержащий специализированные цифровые устройства обработки сигналов (СЦУОС) и встроенные вычислитель и оперативную память. СЦУОС совместно с вычислителем обеспечивают поиск и обнаружение оцифрованных в РЧП сигналов обеих СРНС, слежение за сигналами, выделение из них служебной информации и измерение параметров отслеживаемых сигналов. Блок коррелятора позволяет подключить устройства внешней памяти (Flash, SDRAM). Предусмотрен интерфейс сигналов времени, включающий в себя как выдачу метки времени, например, с частотой 1 Гц, так и прием сигналов внешних событий.
Блок интерфейса данных обеспечивает информационное взаимодействие ЦНП с широким спектром внешних устройств. Для связи с внешним прикладным (иначе - главным или хост-процессором) служат интерфейсы PIF/SPI, UART и I2C. Интерфейс PIF - это параллельный 4-битный SPI-подобный интерфейс фирмы MStar Semiconductor. Протоколы обмена по UART - NMEA0183 и бинарный. Для соединения со стандартными пользовательскими устройствами служит интерфейс USB1.1. Предусмотрен интерфейс для подключения дисплея пользовательских устройств, например навигатора (PND). Три вида интерфейса предназначены для подключения внешних датчиков - I2C (мастер) и преобразователь широтно-импульсной модуляции (ШИМ) - для датчиков движения и АЦП (два канала), например, для датчиков температуры. Интерфейс SPI (мастер) предназначается для управления режимами работы РЧП. Предусмотрены также 14 программируемых линий ввода-вывода общего назначения (GPIO) (General Purpose Input/Output).
Блок питания содержит линейные преобразователи напряжения и обеспечивает остальные блоки необходимыми номиналами питания. Во многих применениях возможно электропитание кристалла ЦНП от единственного источника с напряжением 1,8 или 2,8 В.
Блок управления мощностью обладает возможностями гибкой избирательной подачи питания только на активно функционирующие блоки и устройства, обеспечивая тем самым режимы эффективной экономии энергопотребления.В частности, предусмотрено питание от отдельной маломощной батареи схемы хранения реального времени, что позволяет продолжительно отключать устройства приемника (РЧП и ЦНП) и внешний опорный генератор.
Производительность вычислителя ЦНП в состоянии обеспечивать выполнение всего круга задач сигнальной обработки, а также навигационных вычислений для определения координат потребителя. В то же время в вычислителе ЦНП не была запроектирована внутренняя, энергетически независимая память для хранения программ. Объем оперативной памяти был выбран достаточным для хранения программы сигнальной обработки и соответствующих данных, или, в альтернативном варианте, достаточным для хранения только данных, используемых в полном комплекте программ сигнальной и навигационной обработки. В последнем случае программы должны исполняться из внешней памяти, подключаемой к ЦНП по специальному интерфейсу. То есть очередная команда, подлежащая исполнению, выбирается процессором непосредственно из внешней памяти.
Статья в тему
Настраиваемая система автоматического управления освещенностью и температурой в террариуме
В первой лабораторной работе, по согласованию с преподавателем, было
написано техническое задание к дипломному проекту.
НАСТРАИВАЕМАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСВЕЩЕННОСТЬЮ И
ТЕМПЕРАТУРОЙ В ТЕРРАРИУМЕ «ЗАРЯ»
) НАИМЕНОВАНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ
.1) Настраиваемая систе ...