Проектирование и особенности совмещенного GPS/ГЛОНАСС приемника
В настоящее время на массовом рынке дешевой аппаратуры для индивидуальных потребителей появляется двухсистемная аппаратура, работающая по сигналам СРНС GPS и ГЛОНАСС. Однако разнообразие такой аппаратуры невелико, и она не составляет реальной конкуренции односистемной аппаратуре GPS. Причиной этого является дополнительная сложность совмещенной аппаратуры и, соответственно, увеличенные стоимость и потребляемая мощность по сравнению с приемниками GPS.
Главными требованиями к совмещенным GPS/ГЛОНАСС приемникам для массового рынка являются высокая чувствительность, короткое время до первого местопределения, малые габариты и энерго-потребление, удобство интегрирования в пользовательскую аппаратуру, малая стоимость. В то же время эти требования должны удовлетворяться при достаточной точности местоопределений, в том числе в затрудненных условиях приема сигналов.
В ходе проектирования фирмой MStar Semiconductor совмещенного приемника СРНС GPS/ГЛОНАСС главным исходным положением было обязательное наличие в приемнике GPS-ядра, отвечающего самым высоким требованиям к навигационным приемникам для массового рынка. Добавле-ние функциональности ГЛОНАСС рассматривалось как средство некоторого (не доказанного) повышения точности и надежности навигационных опреде-лений. Поэтому в условиях отсутствия массового рынка совмещенных приемников, а следовательно, и неопределенности перспектив массового производства GPS/ГЛОНАСС аппаратуры потребителя как первого опыта такой разработки при определении архитектуры приемника было решено сделать выбор в пользу уменьшения затрат на разработку, а не минимизации единичной стоимости. Было принято следующее основное архитектурное решение. Разраба-тывались два самостоятельных кристалла: радиочастотный преобразователь (РЧП) и кристалл цифрового навигационного процессора (ЦНП). При этом радиочастотный преобразователь - универсальный, оперативно настра-иваемый на прием сигналов GPS L1 C/A или ГЛОНАСС L1. Блок-схема РЧП приведена на рис. 1.
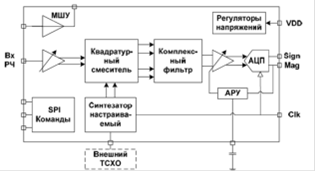
Рис. 1 - Блок-схема радиочастотного преобразователя
Радиочастотный преобразователь выполнен по распространенной схеме с одним преобразованием частоты и низким значением выходной промежуточной частоты (ПЧ) - около 4 МГц в режиме GPS и около 6 МГц в режиме ГЛОНАСС. Выходная ПЧ квантуется на четыре уровня в аналого-цифровом преобразователе (АЦП) - выходы Sign и Mag. Усилитель с переменным коэффициентом усиления управляется системой втоматической регулировки усиления (АРУ), использующей статистику выхода магнитуды квантованного выходного сигнала ПЧ. Синтезатор на базе устройства фазовой автоподстройки (ФАП) с управляемым делителем с дробным коэффициентом деления формирует гетеродинную частоту и частоту дискретизации отсчетов из частоты внешнего термокомпенсированного кварцевого опорного генератора TCXO (Temperature Compensated Crystal Oscillator). Блоки РЧП - прежде всего синтезатор и комплексный фильтр
являются перестраиваемыми и обеспечивают выбор режима приема сигналов GPS или ГЛОНАСС. Блок SPI-команд (Serial Peripheral Interface) обеспечивает управление настройкой элементов РЧП цифровым навигационным процессором. Встроенные линейные регуляторы напряжений обеспечивают блоки РЧП необходимыми номиналами напряжений при использовании единого внешнего питающего напряжения 1,8 В / 3,3 В. В составе РЧП имеется малошумящий усилитель (МШУ), подключаемый внешними соединениями, который позволяет использовать пассивную антенну без внешнего МШУ.
Статья в тему
Модуляционно-легированные транзисторы MODFET, биполярные транзисторы на гетеропереходах. Резонансный туннельный эффект
Высокая степень интеграции, характерная для современной кремниевой
технологии, не может быть достигнута при использовании полупроводниковых
соединений AIIIBV, однако эти соединения обеспечивают
большее быстродействие, прежде всего, за счет высокой подвижности р носителей и
меньши ...