Радиодальнометрия (измерение расстояния)
Основную роль здесь играет второе свойство электромагнитных волн - постоянство скорости распространения.
Т.к. скорость их распространения c=const и известна с большой точностью, то, измерив время ![]() распространения радиоволн от излучателя к приемнику, можно однозначно определить расстояние между ними:
распространения радиоволн от излучателя к приемнику, можно однозначно определить расстояние между ними:
![]()
Т.к. ![]() , каждой микросекунде времени распространения соответствует 300 м пройденного волной расстояния.
, каждой микросекунде времени распространения соответствует 300 м пройденного волной расстояния.
Чтобы измерить время распространения волны, необходимо зафиксировать начало отсчета, сделать «засечку». По способу создания такой «засечки» различают 3 основных метода дальнометрии:
Метод синхронных часов (при импульсном излучении)
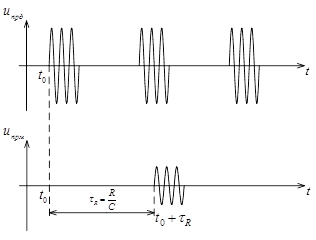
Необходимо, чтобы высокоточные часы передатчика и приемника были синхронизированы. В месте приема фиксируется момент приема импульсного сигнала, время излучения которого известно, и так определяют время распространения волны от передатчика к приемнику.
Метод фазометра (при непрерывном излучении колебаний постоянной частоты ![]() ):
):
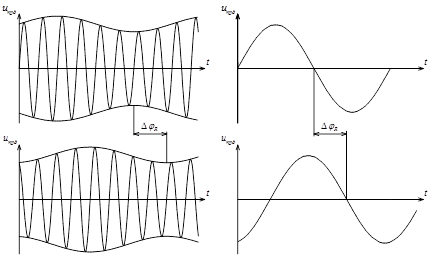
Здесь используется однозначная связь полного фазового сдвига между излученным и принятым сигналами ![]() с временем
с временем ![]() :
:
![]()
Измерение ![]() может осуществляться и на несущей частоте и на частоте огибающей модулированных колебаний.
может осуществляться и на несущей частоте и на частоте огибающей модулированных колебаний.
Метод частотомера (при частотной модуляции передатчика)
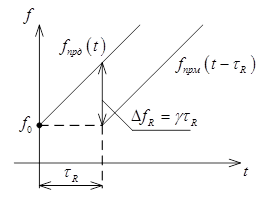
При линейном измерении частоты передатчика по закону ![]() (где
(где ![]() - скорость изменения частоты) запаздывающий на время
- скорость изменения частоты) запаздывающий на время ![]() сигнал на входе приемника будет смещен относительно излученного по частоте на
сигнал на входе приемника будет смещен относительно излученного по частоте на ![]() .
.
Т.к. g=const заранее известная величина, то измерение ![]() сводится к изменению
сводится к изменению ![]() .
.
Основное ограничение всех этих трёх методов связано с трудностью «сверить часы» между передатчиком и приемником, особенно когда один из них расположен на подвижном объекте.
Поэтому в навигационных системах широко используется опора на две или более наземных навигационных пункта, находящихся друг от друга на точно заданном расстоянии, названном базой d (синхронизация часов между ними не составляет особого труда).
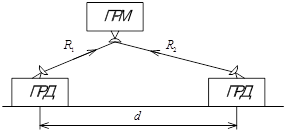
Измерению подвергается сумма или разность расстояний летящего объекта до этих двух пунктов. Соответственно различают суммарно- или разностно-дальномерные системы. При сокращении базы суммарно-дальномерной системы до нуля (d=0), т.е. при совмещении ее двух навигационных пунктов, один из которых представляет собой передатчик, а другой приемник, эта система преобразуется в дальномерную, для которой ![]() и каждой микросекунде времени распространения соответствует 150 м пройденного волной расстояния.
и каждой микросекунде времени распространения соответствует 150 м пройденного волной расстояния.
Статья в тему
Структурные схемы надежности
Расчёты надёжности - это расчёты, предназначенные для определения
количественных показателей надёжности.
На этапе проектирования расчёт надёжности проводится с целью
прогнозирования надёжности проектируемой системы.
На этапе испытаний и эксплуатации расчёт надёжности проводится д ...