Разработка электрической принципиальной схемы прибора
опорное напряжение…… .-10 В
время преобразования……………… .7,5 мкс
Условное обозначение микросхемы приведено на рисунке 2.24.

Рисунок 2.24 -Условное обозначение МС АЦП К572ПВ3
Назначение выводов:
AI1, AI2 - аналоговые входы;
GA - аналоговая земля;
UR - вход для подачи опорного напряжения;
RD - цифровая земля;- выбор микросхемы;- информационный выход;
D0 - D7 - цифровые выходы;
+U - напряжение питания;
V - общий вывод.
Микросхема
К555ЛЕ1. Содержит 4 логических элемента 2ИЛИ-НЕ. Условное обозначение её приведено на рисунке 2.25. Микросхема размещена в 14-контактном пластиковом корпусе DIP
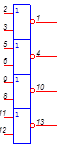
Рисунок 2.25. - Условное обозначение МС К555ЛЕ1
АЛС 335 Б. Одноразрядные цифро-буквенные индикаторы с высотой цифры 11мм из семи сегментов. Изготавливаются на основе светодиодных структур галлий - фосфор - мышьяк. Выпускаются в пластмассовом корпусе
Основные параметры:
сила света одного сегмента при I=20 мА - 0,15 мкд;
сила света децимальной точки при I=20 мА - 0,05 мкд;
постоянное прямое напряжение при I=20 мА - 2,5 В;
максимум спектрального распределения излучения на длине волны - 0,65-0,67 мкм;
постоянный прямой ток через один сегмент:
при Токр<35°С - 25 мА;
при Токр=70°С - 7,5 мА;
мощность рассеяния индикатора:
при Токр<35°С - 500 мВт;
при Токр=70°С - 150 мВт;
постоянное обратное напряжении - 5 В;
диапазон рабочей температуры окружающей среды - (-60![]() +70)°С.
+70)°С.
Условное обозначение микросхемы приведено на рисунке 2.26.
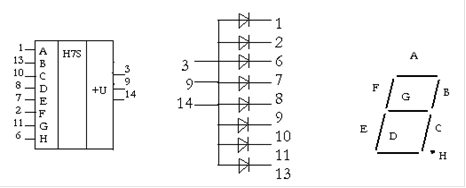
Рисунок 2.26 -Условное обозначение МС ЦОУ АЛС 335 Б
Микросхема МАХ 232. Микросхема фирмы MAXIM. Содержит 2 приемника и 2 передатчика интерфейса RS-232С, который имеет форму 25-контактного разъема типа D.
Основные параметры:
скорость передачи информации - 116 кБ/с;
напряжение питания - 5В;
потребляемый ток - 4мА;
количество конденсаторов - 5;
номинальная емкость конденсаторов - 10мФ.
Условное обозначение микросхемы приведено на рисунке 2.27.
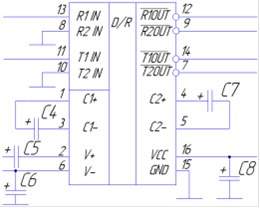
Рисунок 2.27 - Условное обозначение микросхемы MAX 232
Назначение выводов:
T1IN, T2IN. R1OUT. R2OUT - выводы, подключаемые к микропроцессору;
- T1OUT, T2OUT. R1IN. R2IN - выводы, подключаемые к RS - 232;
- C1+, С1-, С2+, С2-, V+, V- - выводы для подключения конденсаторов;
Uсс - напряжение питания;
GND - общий вывод.
Расчет токоограничивающих резисторов. Чтобы обеспечить токовый режим каждого цифробуквенного индикатора, необходимо рассчитать токоограничивающие резисторы R11-R18.
пр = 2В; Е = 5В; Iпр = 10мА.
![]() (2.7)
(2.7)
Остальные резисторы R12-R18 будут такие же, значит примем резисторы R11-R18 равными 300 Ом.
Разработка усилителя. После преобразования неэлектрической величины в электрическую с помощью ИП, полученный полезный сигнал необходимо усилить при помощи усилителя.
Усилитель. В качестве усилителя сигналов, полученных с фотодиода, используется операционныйусилитель LM317Т. На рисунке 2.28 представлена схема включения усилителя.
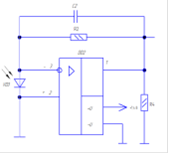
Рисунок 2.28 - Схема подключения усилителя
Произведем расчет согласующего усилителя:
![]() (2.8)
(2.8)
где Sλmax - максимальнаяинтегральная чувствительность фотоприемника, Sλmax = 0,6 А/Вт;
Sλотн - относительная чувствительность фотоприемника на определенной длине волны, А/Вт.
Найдем значение I для используемых длин волн:
для излучения на длине волны λ = 913 нм
I = 0,6•0,56 •10-3•0,5 = 0,168 мА;
Далее необходимо рассчитать сопротивление обратной связиRос:
Rос=Uвых/I; (2.9)
где Uвых - выходное напряжение (Uвых= 0,5-1 В).
Решая обратную задачу, получим, что необходимо выбрать резистор сопротивлением Rос = 600 кОм.
Расчет потребляемой мощности осуществляется по следующей формуле:
![]() (2.10)
(2.10)
где I- суммарный ток, мА;
U- напряжение питания, U = 7,4В.
Найдем I, суммируя все токи:
I = 150 + 0,07 + 4 + 11 + 13 + 20 + 0,2 + 1,5 • 3 + 0,6 = 203,37 мА.
Статья в тему
Трассовый обзорный радиолокатор
Радиолокация - это область науки и техники,
объединяющая методы и средства обнаружения, измерения координат, а также
определение свойств и характеристик различных объектов, основанных на
использовании радиоволн.
В процессе радиолокационного наблюдения мы
получаем радиолокационную ...