Расчет выходного каскада
Рассчитаем рабочую точку двумя способами:
. При использовании активного сопротивления Rк в цепи коллектора.
. При использовании дросселя в цепи коллектора.
. Рассчитаем рабочую точку при использовании активного сопротивления Rк в цепи коллектора [2].
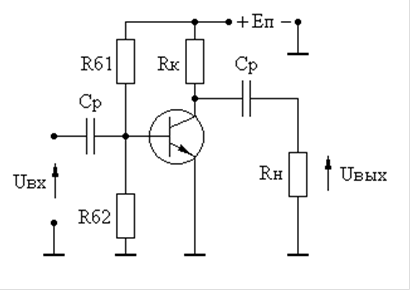
Рисунок 2.2 - Каскад с активным сопротивлением ![]() в цепи коллектора.
в цепи коллектора.
Расчеты производятся при условии, что:
![]() ,
, ![]() ;
;
 ;
;
 ;(2.2.1)
;(2.2.1)
![]() ;
;
![]() ;
;
Рассчитаем ток рабочей точки:
 ;(2.2.2)
;(2.2.2)
Для ИУ однополярных сигналов с большой скважностью:
 ;(2.2.3)
;(2.2.3)
Постоянная мощность, рассеиваемая на коллекторе:
![]() ;(2.2.4)
;(2.2.4)
Мощность, рассеиваемая на ![]() :
:
![]() ;(2.2.5)
;(2.2.5)
Требуемое значение напряжения источника питания ![]() для рассмотренных выше случаев равно:
для рассмотренных выше случаев равно:
![]() ;(2.2.6)
;(2.2.6)
Потребляемая мощность:
![]() ;(2.2.7)
;(2.2.7)
Выходная мощность:
![]() ;(2.2.8)
;(2.2.8)
Коэффициент полезного действия:
 ;(2.2.9)
;(2.2.9)
Пусть![]() ,
, ![]() .
.
Найдем ![]() по формуле (2.2.1):
по формуле (2.2.1):
 .
.
Рассчитаем рабочую точку по формулам (2.2.2) и (2.2.3):
 ;
;
Т.к. ![]() оказываются значительно меньше аналогичных справочных значений для маломощных транзисторов, то положим
оказываются значительно меньше аналогичных справочных значений для маломощных транзисторов, то положим ![]() .
.
 ;
;
Определим ![]() по (2.2.6):
по (2.2.6):
![]() ;
;
Найдём потребляемую мощность, мощность, рассеиваемую на коллекторе, выходную мощность и мощность, рассеиваемая на Rк по формулам (2.2.7), (2.2.4), (2.2.8) и (2.2.5) соответственно:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Из формулы (2.2.9) находим КПД:
 .
.
. Рассчитаем рабочую точку при использовании дросселя ![]() в цепи коллектора [2].
в цепи коллектора [2].
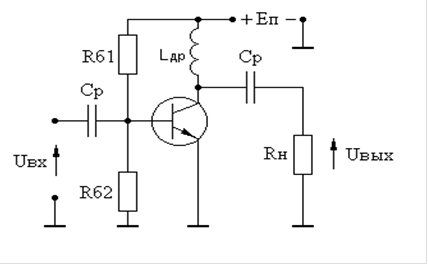
Рисунок 2.3 - Каскад с дросселем ![]() в цепи коллектора.
в цепи коллектора.
Пусть![]() ,
, ![]()
Статья в тему
Структурные схемы надежности
Расчёты надёжности - это расчёты, предназначенные для определения
количественных показателей надёжности.
На этапе проектирования расчёт надёжности проводится с целью
прогнозирования надёжности проектируемой системы.
На этапе испытаний и эксплуатации расчёт надёжности проводится д ...