Ротационный метод вискозиметрии
Ротационный метод вискозиметрии заключается в том, что исследуемая жидкость помещается в малый зазор между двумя телами, необходимый для сдвига исследуемой среды. Одно из тел на протяжении всего опыта остаётся неподвижным, другое, называемое ротором ротационного вискозиметра, совершает вращение с постоянной скоростью.
Очевидно, что вращательное движение ротора визкозиметра передается к другой поверхности (посредством движения вязкой среды; отсутствие проскальзывания среды у поверхностей тела предполагается, таким образом рассматриваются). Отсюда следует тезис: момент вращения ротора ротационного вискозиметра является мерой вязкости. Для простоты мы рассмотрим инверсную модель ротационного вискозиметра: вращаться будет внешнее тело, внутренее тело останется неподвижным, ему и будет сообщаться момент вращения. Однако для краткости изложения будем называть внутреннее тело ротором ротационного вискозиметра. На рисунке 6 расположено схематическое изображение ротационного вискозиметра.
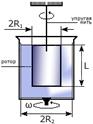
Рисунок 6 - Схематическое изображение ротационного вискозиметра
Введём необходимые обозначения:,L - радиус и длина ротора ротационного вискозиметра;
ω - постоянная угловая скорость вращения внешнего тела;- радиус вращающегося резервуара ротационного вискозиметра;
η - вязкость исследуемой cреды;- момент вращения, передаваемый через вязкую жидкость, равный
![]()
,l - диаметр и длина упругой нити,
φ - угол, на который закручивается неподвижно закреплённая нить,- момент упругости материала нити
При этом крутящий момент M1 ротора ротационного вискозиметра уравновешивается моментом сил упругости нити М2:
![]() .
.
Заметим вновь, что М1=М2, откуда после нескольких преобразований относительно η имеем:
![]() , или
, или
![]() ,
,
где k - постоянная ротационного вискозиметра.
Если рассматривать ту же задачу для ротационного вискозиметра с вращающимся внутренним (ротором висозиметра) и неподвижным внешним телами, имеем:
![]() , или
, или
![]()
В этом случае G - момент, необходимый для поддержания постоянной частоты вращения, (один оборот ротора вискозиметра за τ с).
Заметим, что полученные отношения справедливы для цилиндра бесконечной длины, в реальных условиях учитывается поправка на размеры тел ротационного вискозиметра.
Для этого производится вычисление так называемой эффективной высоты H ротационного вискозиметра:
. проводится измерение момента для жидкостей с различным значением вязкости (η1 и η2) при двух различных высотах внутреннего цилиндра (L1 и L2);
. экстраполяцией прямых М1 = f(L) и М2 = f(L) к нулевому значению М1 и М2 получают величину ∆L;
Статья в тему
Параметрический синтез антенны базовой станции по заданным требованиям к диаграмме направленности
Антенной
называется радиотехническое устройство, предназначенное для изучения или приема
электромагнитных волн. Антенна является одним из важнейших элементов любой
радиотехнической системы, связанной с излучением или приемом радиоволн. К таким
системам относят: системы радиосвязи, ра ...