Трехфазная управляемая схема со средней точкой
В отличие от схемы неуправляемого выпрямителя или управляемого, но работающего с углом a=0, в данном случае управляющие импульсы приходят на тиристоры поочередно с задержкой на угол a относительно моментов прохождения через нуль синусоид линейных напряжений вторичных обмоток трансформатора. Моменты прохождения через нуль синусоид линейного напряжения соответствуют точкам пересечения синусоид напряжений ua, ub, uc.
При активно-индуктивной нагрузке схема может работать в двух режимах: режим непрерывных токов, когда![]() (угол регулирования a в трехфазных выпрямителях принято отсчитывать от точки естественного отпирания вентилей) и режим прерывистых токов
(угол регулирования a в трехфазных выпрямителях принято отсчитывать от точки естественного отпирания вентилей) и режим прерывистых токов![]() . Прерывистость тока в цепи нагрузки зависит не только от диапазона изменения угла регулирования a, но и от соотношения параметров нагрузки Rн и Lн. Так же, как и в однофазных схемах, кривая выпрямленного напряжения на интервале a может иметь отрицательные значения, что объясняется возможностью вентиля пропускать ток при отрицательном напряжении на обмотке данной фазы за счет накопленной энергии в магнитном поле дросселя Lн. Если a
. Прерывистость тока в цепи нагрузки зависит не только от диапазона изменения угла регулирования a, но и от соотношения параметров нагрузки Rн и Lн. Так же, как и в однофазных схемах, кривая выпрямленного напряжения на интервале a может иметь отрицательные значения, что объясняется возможностью вентиля пропускать ток при отрицательном напряжении на обмотке данной фазы за счет накопленной энергии в магнитном поле дросселя Lн. Если a![]() , непрерывный режим тока имеет место при любых соотношениях Rн и Lн и ничем не отличается от случая активной нагрузки для тех же a
, непрерывный режим тока имеет место при любых соотношениях Rн и Lн и ничем не отличается от случая активной нагрузки для тех же a![]() . В случае дальнейшего увеличения угла регулирования, непрерывный режим тока сохраняется только при значительном преобладании индуктивности Lн (
. В случае дальнейшего увеличения угла регулирования, непрерывный режим тока сохраняется только при значительном преобладании индуктивности Lн (![]() . Для (
. Для (![]() без больших погрешностей можно считать ток нагрузки идеально сглаженным.
без больших погрешностей можно считать ток нагрузки идеально сглаженным.
Для исключения отрицательных участков в кривой выпрямленного напряжения и улучшения коэффициента мощности выпрямителя в схему вводится нулевой вентиль Д0, шунтирующий нагрузку.
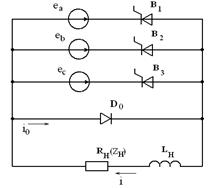
Рисунок 1.3 - Трехфазный управляемый выпрямитель со средней точкой (LH=¥)
Ток через нулевой вентиль при активно-индуктивной нагрузке поддерживается за счет ЭДС самоиндукции нагрузки и протекает за интервал времени π/6 (рисунок 1.3). При этом напряжение на нагрузке в интервале времени π/6 равно нулю, а тиристоры В1, В2, В3 заперты.
Статья в тему
Схема дистанционного акустического светорегулятора
В
данной работе предлагается схема регулятора, который позволяет дистанционно при
помощи акустических звуков управлять нагрузками, например, светильниками,
двигателями и т.д. Исследования схемы позволит управлять нагрузками плавно, что
увеличит срок службы нагрузки. В будущем, собрав ...