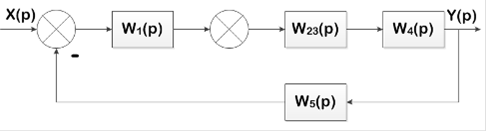
Преобразование структурной схемы
Преобразование параллельного соединения звеньев 2 и 3
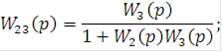

Преобразование последовательного соединения:
![]()

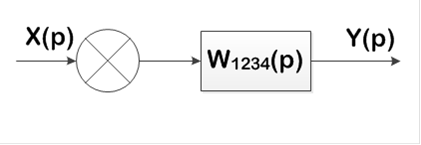
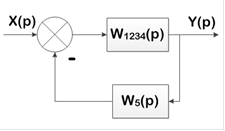
Структурная схема разомкнутой системы:
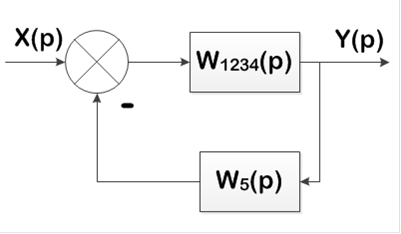
Структурная схема замкнутой системы
Статья в тему
Ёмкостные уровнемеры
Техника конструирования и применения датчиков (сенсорика) развилась в
самостоятельную ветвь измерительной техники. С ростом автоматизации к датчикам
физических параметров стали предъявляться все более высокие требования. При
этом особое значение придается следующим показателям:
* м ...