Нахождение значений коэффициентов PID-регулятора, исходя из заданных в техническом задании качественных показателей цифровой системы управления
Для нахождения оптимальных значений коэффициентов PID-регуляторов используется пакет прикладной программы Nonlinear Control Design (проектирование нелинейных систем управления).
Пакет прикладной программы Nonlinear Control Design (в составе прикладной программы MatLab+Simulink) предназначен для параметрической оптимизации замкнутых систем управления. Он является специализированной программой для решения задач оптимизации значений параметров систем управления при наличии ограничений в форме неравенств. В данном случае этот пакет прикладной программы используется для нахождения оптимальных значений коэффициентов PID-регулятора, который включен в замкнутый контур системы управления.
Прежде чем начать процесс определения коэффициентов необходимо установить предельные значения параметров переходного процесса разрабатываемой цифровой системы управления исходя из требуемых ее качественных показателей. К таким параметрам относятся коэффициент перерегулирования, время переходного процесса и погрешность в установившемся режиме.
Необходимо подчеркнуть, что, несмотря на то, что коэффициенты будут использоваться, во-первых, в программной реализации PID-регулятора, во-вторых, PID-регулятор будет использован в цифровой системе управления, поиск их проводиться на базе исходной аналоговой системы управления. Процесс нахождения коэффициентов складывается из следующих операций.
Структурная схема аналоговой системы управления с PID-регулятором и блоком NCD Outport на выходе системы приведена на рис. 5.14.
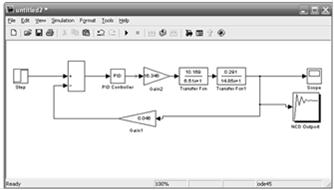
Рис. 20 Структурная система
. Открывается окно параметров PID-регулятора (рис. 5.15) и в соответствующих строках окна устанавливаются символы коэффициентов PID-регулятора (Kp, Ki, Kd).
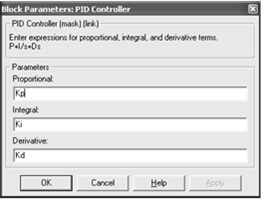
Рис. 5.15. Окно параметров PID-регулятора
. Открывается окно Response Axis limits (кнопка Options строка Y-Axis) блока NCD Outport и там устанавливается диапазон изменения выходного сигнала системы от 0 до160 (рис. 5.19).
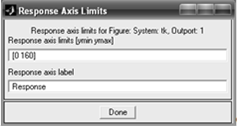
Рис. 5.19. Окно Response Axis limits
. Указываются положения красных ограничительных линий. Для верхней левой линии (рис. 5.20).
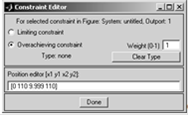
Рис. 5.20. Окно установки параметров красных ограничительных линий (верхней левой линии)
Для верхней правой линии (рис. 5.21).

Рис. 5.21. Окно установки параметров красных ограничительных линий (верхней правой 6линии)
Для правой нижней линии (рис. 5.22).

Рис. 5.22. Окно установки параметров красных ограничительных линий (нижней левой линии)
Для левой нижней линии (рис. 5.23).

Рис. 5.23. Окно установки параметров красных ограничительных линий (нижней правой линии)
. Открывается окно Optimization Parameters (рис. 5.18) (кнопка Optimization в командной строке окна Outport) и там, в строке Tunable Variables устанавливаются символы коэффициентов Kp, Ki, Kd. В строке Discretization interval указывается точностной параметр моделирования (0.05).
Статья в тему
Энергетические соотношения в радиолокации. Дальность действия беззапросной РЛС
Пусть
передатчик мощностью Рпрд с коэффициентом усиления его
антенны GПРД
облучает приемник с эффективной площадью антенны
SэфПРМ,
удаленный тот него на расстояние R.
Плотность
мощности излучения у приемника ПR
[Вт/м2] определяется отношением мощности PПРД
к площади ...