Определение периода квантования по времени
Существует два типа алгоритмов дискретных регуляторов - позиционный алгоритм и алгоритм в приращениях. Рассмотрим математическую модель позиционного PID-регулятора.
В математической модели PID-регулятора, построенного по позиционному алгоритму, выходной сигнал PID-регулятора представляет собой сумму сигналов на выходе P-, I- и D-регуляторов
![]() ,
,
где tК - период квантования; k - порядковый номер периода квантования.
Математическая модель P-регулятора имеет вид
![]() ,
,
где e(k×tk) - сигнал на входе Р-регулятора.
Математическая модель I-регулятора имеет вид
![]() ,
,
где gi[(k-1)×tk] - значение выходного сигнала на предыдущем периоде квантования; gi(k×tk) - значение выходного сигнала на текущем периоде квантования.
Математическая модель D-регулятора имеет вид
![]() ,
,
где ε[(k-1)×tk] - значение входного сигнала на предыдущем периоде квантования; ε(k×tk) - значение входного сигнала на текущем периоде квантования.
При использовании прикладной программы MatLab+Simulink весь процесс нахождения последовательного корректирующего устройства для системы управления осуществляется через программу LTI и SISO Design for System FeedbackConfig. На модель системы поместим Input и Output порты
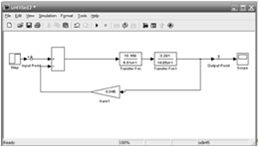
Рис. 10Input и Output порты на модели системы
Получим переходной процесс
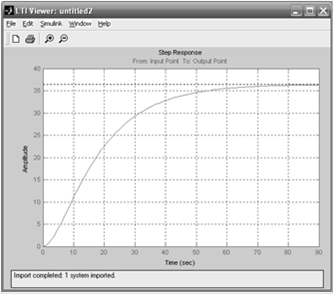
Рис. 11 Переходной процесс системы
Экспортируем в workspace нашу модель
Запустим SISO Design for System FeedbackConfig с помощью команды
>>rltool.
Импортируем нашу систему, поместим её в блок G, а в блок H значение отрицательной обратной связи.
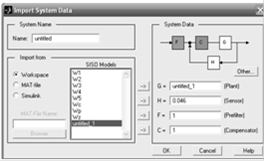
Рис. 12 Импорт модели в SISO Design for SystemConfig
Жмем ОК. В графической части окна указываются полюсы (квадратики) характеристического уравнения системы и линии их возможного изменения.
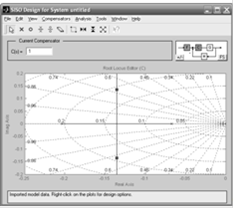
Рис. 13 Полюсы характеристического уравнения
Для визуального наблюдения влияния выбираемого корректирующего устройства на качество системы откроем окно функции переходного процесса LTI Viewer for SISO Design Tool и окно логарифмической амплитудно-частотной характеристики (ЛАЧХ) Open-Loop Bode Editor.
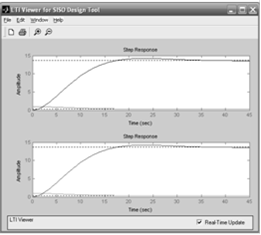
Рис. 14 Переходные процессы системы без коррекции (нижнее окно) и во время коррекции (верхнее окно).
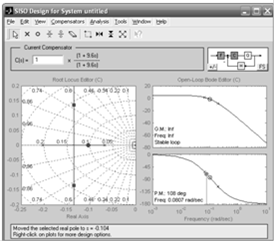
Рис. 15 Изменения в ЛАЧХ
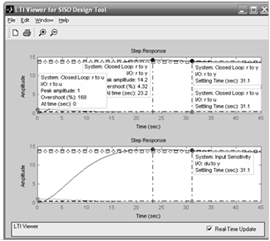
Рис. 16 Изменения в переходном процессе (верхняя часть)
При щелчке левой кнопкой в окне SISO Design for System на структурной схеме по квадрату с индексом С (Edit Compensator C) возникает окно со всеми параметрами корректирующего устройства.
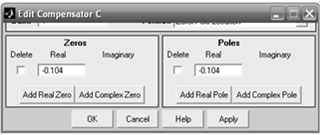
Рис. 17 Параметры корректирующего устройства
Найденная передаточная функция корректирующего устройства:
W(s) = (1+9.6s)/(1+9.6s)
Проверим наш регулятор:
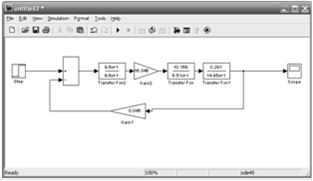
Рис. 18 Структурная скорректированная система управления
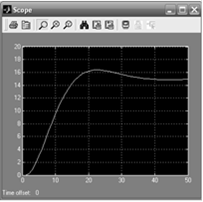
Рис. 19 Кривая переходного процесса скорректированной системы управления
Статья в тему
Модели в экономике
Цифровой
проигрыватель (музыкальный плеер, от англ. player, в некоторых случаях
«MP3-плеер») - устройство, которое хранит, организовывает и воспроизводит
музыкальные композиции, сохранённые в цифровом виде, в отличие от аудиоплееров,
которые проигрывают музыку с таких носителей, как ...