Определение периода квантования по времени
Чтобы определить период квантования по времени необходимо выполнить следующие операции.
. В одном наборном поле создать две модели разрабатываемой автоматической системы. Первая модель должна быть исходной аналоговой автоматической системой, которую необходимо разработать в курсовой работе. Вторая модель (дискретная) должна быть аналогична первой, но с введенным в нее дискретным блоком Zero-Order Hold, имитирующим работу промышленного контроллера с определенным периодом квантования.
. На обе модели должен подаваться входной сигнал с одного источника. Выходные сигналы моделей надо подключить к виртуальному осциллографу. Кроме того, на осциллограф необходимо подать и разность выходных сигналов. Задавая блоку, имитирующему промышленный контроллер, различные значения величины периода квантования по времени, возможно определить влияние величины квантования на погрешность работы дискретной автоматической системы по сравнению с исходной аналоговой системой
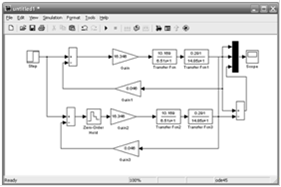
Рис. 6 Структурные схемы систем управления
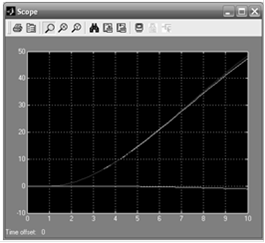
Рис. 7 Разность между выходными параметрами двух схем
На рис. верхняя кривая характеризует выходной параметр цифровой системы управления. Средняя кривая характеризует выходной параметр аналоговой системы управления. Нижняя кривая характеризует разность между выходными параметрами обеих систем. Эта кривая указывает величину погрешности цифровой системы управления относительно аналоговой системы управления при введении в цифровую систему периода квантования по времени. Для рассматриваемого примера при величине заданной погрешности в 5% величина периода квантования по времени составила tk=0.145 с.
. Синтез системы управления с использованием корректирующих устройств
Под синтезом систем управления понимается задача выбора и расчета параметров специальных корректирующих устройств, обеспечивающих заданные статические и динамические качества разрабатываемой системы управления. В настоящее время разработано большое число в основном приближенных методов выбора и расчета корректирующих устройств. Наибольшее распространение в инженерной практике получили графо-аналитические методы синтеза, основанные на построении логарифмических частотных характеристик разомкнутой системы управления.
Идея метода основана на том, что устанавливается связь между переходным процессом системы управления и ее логарифмической частотной характеристикой. Зная желаемый вид переходного процесса в системе управления, возможно построить соответствующую такому процессу желаемую ЛЧХ. К построенной желаемой ЛЧХ приближают исходную ЛЧХ нескорректированной системы управления за счет введения в систему определенного вида корректирующего устройства. В нашем случае - PID-регулятора. Регулятором называется устройство (программа), вырабатывающее управляющее воздействие с целью реализации локальной задачи управления. Обеспечение требуемых качественных показателей системы управления в ряде случаев достигается применением в замкнутом контуре системы различных регуляторов. При включении регуляторов в замкнутый контур системы управления их параметры подбираются из условия достижения заданных качественных показателей разрабатываемой системы управления. Существует три типа регуляторов, которые в дальнейшем будем обозначать латинскими буквами:
) пропорциональные регуляторы (P-регуляторы) с передаточной функцией
![]() ,
,
где s - оператор Лапласа, Kp - коэффициент регулятора;
) интегральные регуляторы (I-регуляторы) с передаточной функцией
![]() ,
,
где ![]() - коэффициент регулятора;
- коэффициент регулятора;
) дифференциальные регуляторы (D-регуляторы) с передаточной функцией
![]() ,
,
где Kd - коэффициент регулятора.
Регуляторы, как правило, используются в различных сочетаниях. В данном случае нам нужен PID-регулятор
пропорционально-интегро-дифференциальные регуляторы (PID-регуляторы) с передаточной функцией
![]()
![]() ,
,
где  - коэффициент I-регулятора,
- коэффициент I-регулятора,  - коэффициент P-регулятора,
- коэффициент P-регулятора,  - коэффициент D-регулятора.
- коэффициент D-регулятора.
Для того чтобы реализовать этот PID-регулятор программным методом, необходимо создать его дискретную математическую модель.
При достаточно малых величинах времени квантования (tk) производные по времени можно заменить конечными разностями, а интегралы - суммами.
Статья в тему
Цифровые устройства и микропроцессоры
Современный этап развития вычислительной техники характеризуется разработкой микропроцессорных средств. Микропроцессоры (МП) используются в качестве элементной базы для реализации устройств обработки данных. При этом каждая сфера применения МП предъявляет свои специфические требования к и ...