Синтез схемы управления секцией памяти
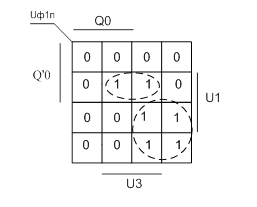
Рисунок 3.13 - Карта Карно для нахождения сигнала, поступающего на первую фазу секции памяти
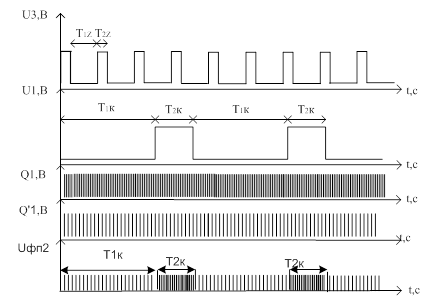
Рисунок 3.14- Временные диаграммы управляющих потенциалов для второй фазы секции памяти
На карте Карно изображены несколько единичных областей(рисунок 3.15).
Исходя из этого, минимальная конъюнктивная нормальная форма будет иметь вид:
![]()
Спроектируем устройство для получения последовательности импульсов на третей фазе секции памяти, временные диаграммы показаны на рисунке 3.16. Таблица истинности показана в таблице 3.7
Таблица 3.7 - Таблица истинности для функции Uф3п
|
№ терма |
U1 |
U3 |
Q2 |
Q'2 |
Uф3п |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
1 |
0 |
|
2 |
0 |
0 |
1 |
0 |
0 |
|
3 |
0 |
0 |
1 |
1 |
0 |
|
4 |
0 |
1 |
0 |
0 |
0 |
|
5 |
0 |
1 |
0 |
1 |
1 |
|
7 |
0 |
1 |
1 |
1 |
1 |
|
8 |
1 |
0 |
0 |
0 |
0 |
|
9 |
1 |
0 |
0 |
1 |
0 |
|
13 |
1 |
1 |
0 |
1 |
0 |
|
11 |
1 |
0 |
1 |
1 |
1 |
|
15 |
1 |
1 |
1 |
1 |
1 |
|
6 |
0 |
1 |
1 |
0 |
0 |
|
14 |
1 |
1 |
1 |
0 |
1 |
|
10 |
1 |
0 |
1 |
0 |
1 |
|
12 |
1 |
1 |
0 |
0 |
0 |
Статья в тему
Усилитель широкополосный
Основной целью данного курсового проекта является разработка широкополосного усилителя. В настоящее время такие усилители могут применяться в осциллографии, в исследованиях прохождения радиоволн в различных средах, в том числе прохождения различных длин волн в городских условиях.
В задачу входит ан ...