Синтез схемы управления секцией памяти
Таблица 3.6 - Таблица истинности для функции Uф2п
|
№ термаU1U3Q1Q'1Uф2п | |||||
|
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
1 |
0 |
|
2 |
0 |
0 |
1 |
0 |
0 |
|
3 |
0 |
0 |
1 |
1 |
0 |
|
4 |
0 |
1 |
0 |
0 |
0 |
|
5 |
0 |
1 |
0 |
1 |
1 |
|
7 |
0 |
1 |
1 |
1 |
1 |
|
8 |
1 |
0 |
0 |
0 |
0 |
|
9 |
1 |
0 |
0 |
1 |
0 |
|
13 |
1 |
1 |
0 |
1 |
0 |
|
11 |
1 |
0 |
1 |
1 |
1 |
|
15 |
1 |
1 |
1 |
1 |
1 |
|
6 |
0 |
1 |
1 |
0 |
0 |
|
14 |
1 |
1 |
1 |
0 |
1 |
|
10 |
1 |
0 |
1 |
0 |
1 |
|
12 |
1 |
1 |
0 |
0 |
0 |
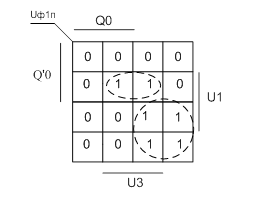
Рисунок 3.13 - Карта Карно для нахождения сигнала, поступающего на первую фазу секции памяти
На карте Карно изображены несколько единичных областей (рисунок 3.15).
Исходя из этого, минимальная конъюнктивная нормальная форма будет иметь вид:
![]()
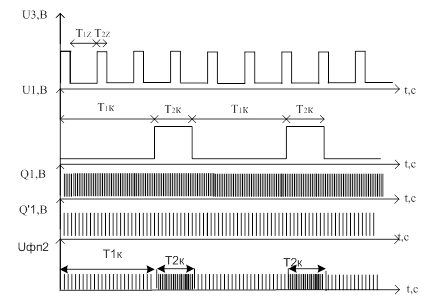
Рисунок 3.14 - Временные диаграммы управляющих потенциалов для второй фазы секции памяти
Статья в тему
Трасса прокладки ВОЛП между пунктами Екатеринбург-Серов
Научно-технический прогресс во многом определяется скоростью передачи
информации и ее объемом. Возможность резкого увеличения объемов передаваемой
информации наиболее полно реализуется в результате применения
волоконно-оптических линий передачи (ВОЛП), которые по сравнению с такими
ш ...