Выбор режима работы транзистора
Определение оптимального сопротивления нагрузки и входного сопротивления транзистора. Определение напряжения питания и смещения:
Для мощного автогенератора одними из основных параметров считают уровень выходной мощности и КПД. Известно, что в этом случае наиболее подходящим является граничный либо слабо перенапряженный режим работы транзистора с углами отсечки тока стока 60°÷120°. При этом напряжение питания следует выбирать исходя из рекомендаций, приводимых производителем транзистора. Для выбора величины напряжения смещения на затворе EЗ, от которого зависит угол отсечки, следует выполнить моделирование работы транзистора в статическом режиме (на постоянном токе).
Пример:
Рассчитаем выходные вольт-амперные характеристики для транзистора EPA160A100P. Для этого создадим новый проект.
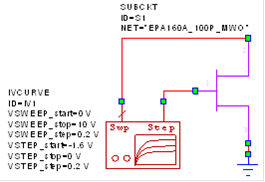
Рис. Схема для моделирования вольт-амперных характеристик.
Импортируем в проект схему с моделью транзистора, созданную ранее. Для этого нажмем ПКМ на пункте Circuit Schematics и выберем команду Import Schematic.
Создадим еще одну схему, вид которой приведен на рисунке.
Схема состоит из следующих элементов:
Элемент для измерения статических вольт-амперных характеристик:
Circuit Elements → MeasDevice → IV → IVCURVE.
Земля: Circuit Elements → Interconnects → GND.(либо кнопка на панели меню).
Модель транзистора подключается с помощью элемента подцепи SUBCKT. Данный элемент можно найти в папке Circuit Elements → Subcircuits. Для более наглядного представления модели транзистора на схеме рекомендуется сменить символ для элемента SUBCKT. Нажмем ЛКМ2 по символу элемента SUBCKT и в закладке Symbol выберем символ с именем FET@system.syf (рис. ).
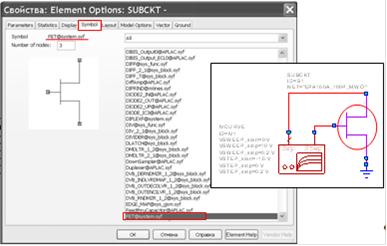
Рис. Замена символа для модели транзистора.
Далее создадим новый график с помощью нажатия ПКМ на пункте Graphs закладки Project и выбора команды New Graph. На созданный график добавим характеристику ВАХ для тока стока в зависимости от напряжения сток-исток. Это можно сделать, нажав ПКМ по графику и выполнив команду Add Measurement. В открывшемся окне (рис.) выберем Nonlinear → Current → IVCURVE.
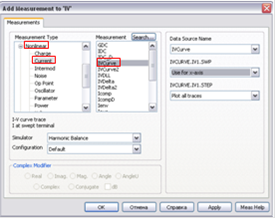
Рис. Окно выбора добавляемой на график характеристики
Если нумерация портов в схеме модели транзистора была выполнена корректно (см. выше), то после запуска процесса моделирования с помощью команды Simulate → Analyse, мы должны получить семейство вольт-амперных характеристик (рис. ).
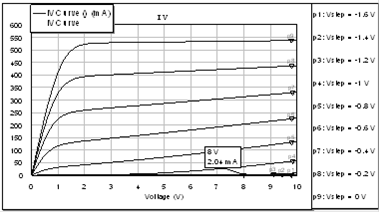
Из рисунка видно, что напряжение отпирания транзистора EЗ0= -1,2 В. При такой величине напряжения смещения угол отсечки тока стока в транзисторе АГ составляет приблизительно 90°.
Далее следует определить входное сопротивление транзистора и оптимальное сопротивление нагрузки, обеспечивающее требуемый уровень выходной мощности и КПД. Для этого используется схема, представленная на рис. Y, где LTUNER2- перестраиваемый трансформатор сопротивлений, который может трансформировать сопротивление нагрузки (порта) в любое требуемое комплексное сопротивление. При этом данный элемент не вносит потерь в мощность проходящего через него сигнала. Он также позволяет подключить в схему источники питания и смещения, обеспечивая их идеальную развязку с СВЧ трактом.
Данную схему следует оптимизировать в соответствии со следующими критериями:
PВЫХ и КПД не менее требуемого уровня;
коэффициент отражения на входе не более -20дБ.
Эти требования должны выполняться на частоте генерации.
Начальное значение мощности входного генератора определяется исходя из коэффициента усиления транзистора, приводимого в справочных данных: PВХ=PВЫХ/KP; (PВХ[дБм] = PВЫХ[дБм] - KP[дБ]).
Напряжение питания транзистора берется из справочных данных (таблица ), а начальное значение напряжения смещения берется равным напряжению отпирания, определенному ранее по вольт-амперным характеристикам транзистора.
Статья в тему
Особенности развития спутникового телевидения в России
Мечта
человека о возможности видеть на любые расстояния отражена в легендах и сказках
многих народов. Осуществить эту мечту удалось в наш век, когда общее развитие
науки и техники подготовило основу для передачи изображения на любое
расстояние.
Телевидение,
является самым обширны ...