Разложение сигнала на типовые составляющие
Разложим аналоговый сигнал на его типовые составляющие, которые включаются в определенный момент времени. Для этого будем исходить из временного представления сигнала (рисунок 1.1) и использовать единичную функцию включения ![]() .
.
![]()
![]()
![]()
![]()
![]()
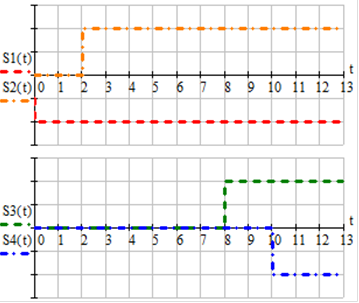
Рисунок 1.2 - Временное представление типовых составляющих сигнала
Статья в тему
Центр электронных технологий и технической диагностики технологических сред и твердотельных структур
Целью
производственной практики является приобретение профессиональных навыков,
закрепление и углубление теоретических навыков в области проектирования и
технологии изготовления РЭС, применение полученных знаний при решении
конкретных задач проектирования РЭС и технологических процес ...