Определение типа трассы радиосвязи и расчета дальности радиосвязи ПРС-С метрового диапазона
В качестве примера расчета рассмотрим перегон ВГ.
Профиль железнодорожной трассы на перегоне ВГ представлен на Рисунке 10.
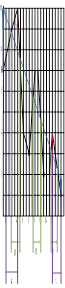
Рисунок 10. Профиль трассы в направлении от станции В к Г
Найдем дальность связи между РС на станции В и локомотивом. Высота установки передающей антенны 30 м, приемной - 5 м. На трассе ВГ имеются холмы в начале, середине и конце, поэтому данный вариант трассы следует отнести к 3 типу определяется по таблице согласно [2]. Глубина закрытия трассы hг -расстояние по вертикали от прямой, соединяющей центры антенн, до вершины препятствия. Если последних несколько, то выбирается наибольшее значение величины hг. В данном случае hг=20 м и по глубине закрытия трасса отвечает 2 типу. Общая линейная протяженности закрытия трассы L= ![]() =33%, по относительной протяженности закрытия трасса ВГ относится к 2 типу определяется по таблице согласно [2].
=33%, по относительной протяженности закрытия трасса ВГ относится к 2 типу определяется по таблице согласно [2].
Расстояние по горизонтали от передающей антенны до ближайшей точки переизлучения радиоволн (вершины левой горы по рис. 1) rн = 4 км, от приемника до подобной точки - rк = 3 км. По последним двум характеристикам трассу ВГ следует отнести соответственно к 2 и 1 типам. Усредненное значение типа трассы: ![]() . Выполним округление до ближайшего числа, кратного величине 0,5 и найдем коэффициент сложности: КСТ = 2.
. Выполним округление до ближайшего числа, кратного величине 0,5 и найдем коэффициент сложности: КСТ = 2.
Аналогичным образом проведем анализ трасс ГВ, ВМ1, М1В, ВМ2, М2В, ГМ2, М2Г, ГМ1, М1Г. Полученные при этом результаты представлены в таблице 5.
Таблица 5.
|
Трасса |
Препятствия |
hг, м |
L,% |
rн, км |
rк, км |
КСТ |
|
ВГ |
3 |
20м=2 |
33%=2 |
4км=2 |
2км=2 |
2 |
|
ГВ |
3 |
30м=3 |
38%=3 |
7км=0 |
4км=1 |
2 |
|
ВМ1 |
2 |
30м=3 |
45%=3 |
4км=2 |
4км=1 |
2 |
|
М1В |
2 |
30м=3 |
50%=4 |
2км=4 |
4км=1 |
2 |
|
ВМ2 |
2 |
21м=3 |
46%=4 |
4км=2 |
2км=2 |
3 |
|
М2В |
2 |
30м=3 |
46%=4 |
2км=4 |
4км=1 |
3 |
|
ГМ2 |
1 |
3м=1 |
14%=1 |
2км=4 |
3км=1 |
1 |
|
М2Г |
1 |
6м=1 |
20%=2 |
3км=3 |
2км=2 |
2 |
|
ГМ1 |
3 |
30м=3 |
35%=3 |
7км=0 |
2км=2 |
2 |
|
М1Г |
2 |
20м=2 |
44%=3 |
2км=4 |
2км=2 |
3 |
Статья в тему
Мультисервисная телекоммуникационная сеть общего пользования
телекоммуникационная сеть радиорелейная телефонная
Мультисервисная сеть (МС) - это сеть связи, построенная в соответствии с концепцией NGN и обеспечивающая предоставление неограниченного набора услуг. В настоящее время появление новых сетевых технологий привело к появлению новых терминалов, обеспеч ...