Расчет передаточной функции сар. определеие устоичивости
Запишем передаточные функции элементов системы:
Передаточная функция микропроцессора имеет вид:
W(P) = 1.
Передаточная функция двигателя постоянного тока имеет вид:
 .
.
Передаточная функция сельсинов имеет вид:
W с (P) = 108
Передаточная функция редуктора имеет вид:
Wр(P) = 0,0036.
Передаточная функция усилительно-преобразовательного устройства имеет вид:
Wуп(P) = ![]()
Выделим в структурой схеме изменяемую и неизменяемую части системы автоматического регулирования. Изменяемая часть состоит из ЭВМ, в состав которой входят микропроцессор, АЦП и ЦАП. Неизменяемая часть состоит из усилителено-преобразовательного устройства, двигателя постоянного тока, редуктора и пары сельсин-датчик - сельсин-приёмник.
Функциональная схема неизменяемой части локальной системы регулирования имеет вид в соответствии с рисунком 4:
Рисунок 4 - Функциональная схема локальной системы регулирования неизменяемой части
Передаточная функция замкнутой системы имеет вид:
![]() .
.
Преобразование данной передаточной функции в программе MathCAD:

Характеристическое уравнение передаточной функции в замкнутом состоянии имеет вид:
![]()
= А0×P3 + А1×P2 + А2×P+А3.
Поверка устойчивости неизменяемой части локальной системы регулирования выполняется на основании критерия устойчивости Гурвица. Для того чтобы система была устойчива необходимо и достаточно, чтобы все определители Гурвица были положительными.
Составление определителей Гурвица и их его вычисление имеют вид:
![]() .
.
 .
.
 .
.
Построение переходного процесса выполняется на основе обратное преобразования Лапласа от передаточной функции системы автоматического регулирования в замкнутой форме. Преобразование по Лапласу от передаточной функции системы автоматического регулирования в замкнутой форме осуществляется в программе MathCAD
![]()
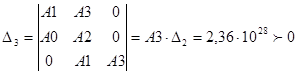
Графическое представление переходного процесса представлено в соответствии с рисунком 5.
Рисунок 5 - График переходного процесса системы
Показатели качества определяются по графику 9 переходного процесса исходной системы автоматического регулирования
1. s = ![]() - перерегулирование.
- перерегулирование.
. n = 0 - число полных колебаний
. tmax = 1,47 - время достижения максимального значения, сек.
. tр = 1,47 - время регулирования, сек.
Проверка устойчивости локальной системы регулирования с учетом ЭВМ выполняется на основании критерия устойчивости Шур - Кона, который позволяет анализировать устойчивость дискретных и дискретно-непрерывных систем по характеристическому уравнению замкнутой системы, записанному в форме z-преобразования.
Замкнутая система будет устойчива, если корни характеристического уравнения будут находиться внутри единичной окружности, т.е., если коэффициенты уравнения будут удовлетворять всем определителям Шур - Кона, имеющих отрицательные значения для нечетных определителей и положительных для четных.
Переход от операторной формы записи передаточной функции замкнутой системы к z- форме и расчет определителей Шур - Кона осуществляется при помощи математического редактора MathCAD.
Разложение передаточной функции замкнутой САР выполняется в программе MathCAD:
![]() .
.
Переход от операторной формы к z -форме выполняется по формуле (учитывая, что разрядности ЦАП и АЦП равны):
Wз (z) =![]()
![]() - фиксатор нулевого порядка
- фиксатор нулевого порядка

z -форма непрерывной части системы автоматического регулирования.
Передаточная функция в z-форме имеет вид
![]()
Полученное выражение преобразуется в программе MathCAD:

Проверка устойчивости передаточной функции в z - форме выполняется по корням характеристического уравнения.
Характеристическое уравнение в z - форме имеет вид:
Статья в тему
Реконструкция внутризоновой сети на базе радиорелейной связи
Радиорелейная связь первоначально применялась для организации многоканальных линий телефонной связи, линий, в которых сообщения передавались с помощью аналогово-электрического сигнала. Первая такая линия с 5 телефонными каналами появилась в США в 1935 году. Она соединяла города Нью-Йорк и Филадельфи ...