Выбор и обоснование схемы электрической структурной
На основании вышеизложенных принципов в курсовом проекте была разработана схема электрическая структурная проектируемого устройства, показанная на рисунке 3.
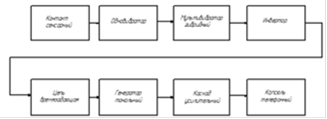
Рисунок 3 - Схема электрическая структурная
Статья в тему
Анализ деятельности ОАО ЗМУ КЧХК
В соответствии с учебным планом я походил производственную практику в ОАО «ЗМУ КЧХК».
Я был принят для прохождения производственной практики в штат лаборатории автоматизации на должность инженера по автоматизации и механизации производственных процессов (АМПП).
Совместно с руководителе ...