Разработка общей структуры системы управления промышленным роботом
![]() ;
;
![]() .
.
Моменты инерции для звеньев и рабочего органа равны:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ,
,
где ![]() - момент инерции i-го звена;
- момент инерции i-го звена;
![]() - момент инерции рабочего органа.
- момент инерции рабочего органа.
Момент инерции ![]() меняется на разных фазах движения из-за изменения конфигурации манипулятора.
меняется на разных фазах движения из-за изменения конфигурации манипулятора.
Подставим найденные выражения для кинетических энергий и моментов инерции в уравнение (5.3):
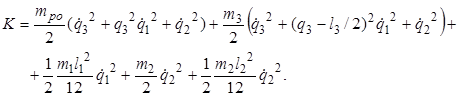
Потенциальная энергия манипулятора равна
![]() .
.
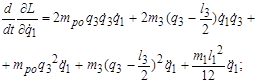
Для уравнения Лагранжа найдем производные:
![]() ;
;
 ;
;
![]() ;
;
 ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Подставим найденные производные в уравнение (4.2), произведем необходимые преобразования и получим решение прямой задачи динамики в векторно-матричной форме (4.3):
Здесь ![]() - момент, развиваемый приводом в первом сочленении,
- момент, развиваемый приводом в первом сочленении, ![]() и
и ![]() - силы, развиваемые приводами во втором и третьем сочленениях.
- силы, развиваемые приводами во втором и третьем сочленениях.
Несмотря на достаточно простую кинематическую схему манипулятора, уравнения динамики являются нелинейными и взаимосвязанными по координатам ![]() и
и ![]() .
.
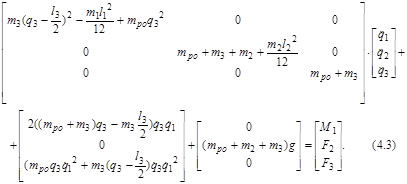
Однако движение по координате ![]() описывается независимым линейным уравнением.
описывается независимым линейным уравнением.
Статья в тему
Трасса прокладки волоконно-оптической линии передачи между пунктами Орел-Пенза
В
современном информационном мире каждые пять лет объём передаваемой информации
увеличивается вдвое, соответственно, встаёт задача передачи большого количества
информации с максимальной скоростью и высокой степенью достоверности на большие
расстояния и её обработка.
Ведущая
р ...