Особенности управления роботом как механической системой
Специфические особенности робототехнических устройств как управляемых объектов обусловлены в первую очередь многообразием видов исполняемых траекторий и существенно более широким диапазоном изменения скоростей и нагрузок по сравнению с традиционным технологическим оборудованием. Задача выбора из данного многообразия конкретных траекторий и режимов, то есть синтез программы движения, решается устройством управления с помощью человека-оператора (в режиме обучения) или автоматически при наличии соответствующих управляющих программ и технических средств сбора и обработки информации о среде [16, 21].
Как правило, робот работает не на установившихся режимах (с заданными и постоянными скоростями), а на управляемых переходных режимах. При этом характерная для его работы цикличность представляет собой периодически повторяемый набор движений, каждое из которых составлено из участков интенсивного разгона и торможения. Это обусловлено тем, что роботы используются в первую очередь как вспомогательное оборудование и не должны ограничивать время цикла работы обслуживаемого технологического оборудования, что обусловливает требование их максимального быстродействия.
Необходимость повышения быстродействия при существенно увеличенном диапазоне скоростей и нагрузок осложняет синтез систем регулирования с требуемым запасом устойчивости и качеством переходных процессов. Эти трудности усугубляются кинематической сложностью исполнительного устройства робота и существенным динамическим взаимовлиянием по различным степеням подвижности. Последнее заключается в том, что в отличие от традиционного технологического оборудования в роботах исполнительные звенья базируются не на одном элементе типа станины, а последовательно друг на друге, образуя механизм в виде разомкнутой кинематической цепи. При движении каждое последующее звено динамически нагружает предыдущие, и в результате существенно искажается заданный программой закон движения звеньев. Такое динамическое взаимодействие, обусловленное инерционными, диссипативными и кориолисовыми силами, не позволяет рассматривать многомерную систему робота как совокупность соответствующего числа автономных одномерных систем. Уменьшение динамического взаимовлияния за счет вынесения приводных двигателей робота на его основание приводит к необходимости организации сложных кинематических цепей привода, образующих планетарный механизм, строение которого определяет силовую связь между степенями подвижности.
Сформулированные особенности робототехнических устройств приводят к необходимости построения иерархических структур систем управления. При этом нижний уровень системы решает задачи регулирования положений и скоростей звеньев исполнительного устройства по поступающим с верхнего уровня и синтезированным там программным значениям. Ниже описывается укрупненная структурная схема устройства управления, рассмотрены задачи, решаемые на верхнем уровне управления, анализируются технические решения, применяемые при построении нижнего уровня управления, и даны обоснования некоторых принципов построения этого уровня управления, обеспечивающего улучшение функционирования системы в целом.
Структурная схема системы управления представлена на рисунке 3.1 [1,9]. Объект управления - манипулятор 9 с приводными двигателями 11, установленными либо в шарнирах звеньев, либо на основании. В последнем случае от двигателей к звеньям вдоль механизма руки протянуты кинематические цепи 10 привода. В шарнирах звеньев для организации контуров управления нижнего уровня, как правило, устанавливают датчики 7 положения звеньев. На двигатели 11 от программы (по каналу прямой связи) поступают управляющие сигналы. Управление положением звеньев требует организации обратных связей по положению от датчиков 7. Совокупность полученных таким образом контуров управления образует нижний уровень устройства управления робота, от возможностей которого во многом зависит качество выполняемых движений.
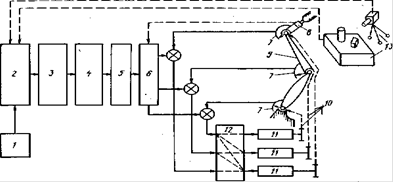
Рисунок 3.1 Структура управления движением робота
Формирование программы управления движениями и действиями робота осуществляется на верхнем уровне устройства управления на основе информации, получаемой от человека-оператора путем указания цели или обучения (блок 1) и от специально организуемых систем очувствления, регистрирующих состояние внешней среды (блок 13). По этой информации создается модель внешней среды той или иной сложности. На основании созданной модели и поставленной оператором цели в блоке 2 формируется и запоминается последовательность действий и план движений робота. При этом осуществляются необходимые проверки на достижимость цели, исходя из свойств модели, отражающих внутренние ограничения (ограничения на подвижность звеньев) и внешние (препятствия в зоне действия робота, скорости перемещения объектов, готовность оборудования к обслуживанию и др.). Полученная на этом этапе программа представляет собой набор координат позиций в рабочем пространстве робота с указанием времени перехода из точки в точку и времени задержки в этих точках, состояния захватного устройства (сжат-разжат), перечня команд, выдаваемых на обслуживаемое оборудование и т. д.
Статья в тему
Технология изготовления диффузионых резисторов на основе кремния
Одним
из основных достижений микроэлектроники является создание на основе
фундаментальных и прикладных наук новой элементной базы интегральных микросхем.
Развитие
вопросов проектирования и совершенствование технологии позволило в короткий
срок создать высоко интегрированные функци ...