Выбор кинематической схемы манипулятора
От выбора кинематической схемы - структуры “скелета” руки - зависят двигательные возможности робота.
Манипулятор представляет собой открытую кинематическую цепь, элементы которой соединены друг с другом посредством кинематических пар. Как правило, это одноподвижные кинематические пары пятого класса - вращательные либо поступательные. Если кинематическая цепь не содержит внутренних замкнутых контуров, то число кинематических пар определяет число степеней подвижности манипулятора [24].
Звенья кинематической цепи соединены кинематическими парами так, что одно из них крепится к основанию (подвижному или неподвижному), а еще одно несет на себе рабочий орган - схват, или инструмент.
Для выбора кинематической схемы манипулятора осуществим анализ существующих типовых компоновок манипуляторов.
Для перемещения манипулятора в любую точку рабочего пространства требуются три кинематических сочленения. Для обеспечения требуемой ориентации в пространстве рабочего органа требуются дополнительно три кинематических сочленения.
По способу осуществления пространственных перемещений манипулятор относится к одной из четырех основных категорий [10, 25]:
манипулятор с декартовой системой координат, имеющий три поступательных сочленения;
манипулятор с цилиндрической системой координат, имеющий одно вращательное и два поступательных сочленения;
манипулятор со сферической системой координат, имеющий одно поступательное и два вращательных сочленения;
манипулятор с шарнирной системой координат, имеющий три вращательных сочленения.
На рисунке 2.1 представлены типовые компоновки промышленных манипуляторов.
С целью уменьшения стоимости системы управления и увеличения точности управления необходимо оптимально выбрать количество кинематических пар манипулятора.
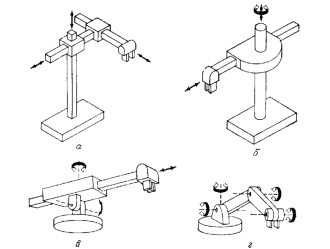
Рисунок 2.1 Типовые компоновки промышленных манипуляторов
а - манипулятор с декартовой системой координат;
б - манипулятор с цилиндрической системой координат;
в - манипулятор со сферической системой координат;
г - манипулятор с шарнирной системой координат.
Рассмотрим возможные кинематические схемы, обеспечивающие неизменную ориентацию рабочего органа.
Манипулятор с шарнирной системой координат (2.1 (г)) обеспечивает условие вертикальной ориентации рабочего органа в различных точках рабочей зоны благодаря добавлению четвертого вращательного сочленения с осью вращения параллельной осям вращения второго и третьего сочленений. Недостатком является большое количество сочленений, что приведет к усложнению и удорожанию системы управления. Поскольку для рассмотренного технологического процесса требуется только обеспечение вертикальной ориентации, нет необходимости в трех дополнительных сочленениях.
Манипулятор с декартовой системой координат, имеющий три поступательных сочленения (2.1 (а)). Манипуляторы с поступательными сочленениями сложны в изготовлении и получили неширокое распространение. К тому же такой манипулятор занимает больше производственной площади, чем манипуляторы с вращательными сочленениями.
Манипулятор со сферической системой координат (2.1 (в)) не обеспечивает условие вертикальной ориентации рабочего органа в различных точках рабочей зоны.
Манипулятор с цилиндрической системой координат с одной вращательной и двумя поступательными сочленениями (2.1 (б)). Имеет преимущества по сравнению с выше описанными. Он имеет всего три сочленения, из которых только два поступательных. К тому же 60% выпущенных в мире манипуляторов имеют такую кинематическую схему. Таким образом, возможно оснащение существующих манипуляторов разработанной в данном дипломном проекте системой управления.
Статья в тему
Светодиоды, их основные параметры и характеристики
Светодиоды,
или светоизлучающие диоды (СИД, в английском варианте LED - light emitting
diode) - полупроводниковый прибор, излучающий некогерентный свет при
пропускании через него электрического тока (рисунок 1). Работа основана на
физическом явлении возникновения светового излучения ...