Оптические системы передачи
Рассчитать чувствительность оптического приемного модуля в соответствии с заданием таблиц 1 и 2.
Таблица 1
|
Исходные данные |
Предпоследняя цифра номера зачетной книжки |
|
0 | |
|
Скорость передачи информации, Мбит/с |
10 |
|
Вероятность ошибки |
10-12 |
|
Тип предусилителя |
Высокоимпедансный |
|
Крутизна полевого транзистора, мА/В |
10 |
|
|
Таблица 2
|
Исходные данные |
Предпоследняя цифра номера зачетной книжки |
|
5 | |
|
Тип фотодетектора |
ЛФД |
|
Емкость фотодетектора, пФ |
2 |
|
Емкость предусилителя, пФ |
1 |
|
Коэффициент шума полевого транзистора |
1,7 |
|
I затвора полевого транзистора, нА |
100 |
Решение:
Шумовой ток приемного оптоэлектронного модуля.
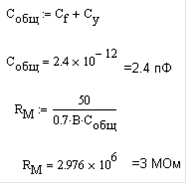
Сопротивление нагрузки фотодетектора ![]() определяется выражением:
определяется выражением:
где В - скорость передачи ; СΣ = Сф + Су , Сф - емкость фотодетектора, Су -входная емкость предусилителя.
Порог чувствительности цифровых приемных модулей определяется через общий шумовой ток ![]() . Полный шумовой ток усилителя равен сумме составляющих шумовых токов:
. Полный шумовой ток усилителя равен сумме составляющих шумовых токов: ![]() .
.
![]()
Найдем каждую составляющую полного шумового тока.
Рассчитаем тепловой шум, обусловленный сопротивлением ![]() :
:
![]()
где k - постоянная Больцмана, Т - температура, В - скорость передачи и In2 - интеграл Персоника, зависящий от передаточной характеристики цепи. В случае прямоугольных входных импульсов длительностью 1/В и выходных импульсов в форме «приподнятого косинуса» (reised cosine). In2=0,55.
![]()
Рассчитаем дробовый шум
![]()
где Iут - сумма тока утечки затвора полевого транзистора и других шунтирующих источников тока; Iт - темновой ток p-i-n фотодиода.ут задан в исходных данных, Iт зависит от используемого фотодиода. Выбирем тип фотодиода кремниевый фотодиод ФД-265-01, максимальное значение темнового тока при температуре 25 С составляет 5 нА. Тогда:
![]()
Рассчитаем шумовой ток канала:
На выходе транзистора существует еще одна составляющая шумового тока. Приводя этот ток ко входу, получим ЭДС шума в единичной полосе для полевого транзистора:
![]()
Здесь Fпт - шум-фактор полевого транзистора и gМ - его крутизна в рабочей точке.
Статья в тему
Безопасность в Internet
Несанкционированный доступ к информации в компьютерных сетях превратился сегодня в одну из серьезнейших проблем, стоящих на пути развития телекоммуникационной среды и информационной инфраструктуры общества. Страны, где вычислительные системы и компьютерные сети проникли во все сферы человеческой дея ...