Расчет сетей связи с минимальной протяженностью связей
|
0 |
280 |
240 |
580 |
160 |
170 |
280 |
1420 | |
|
0 |
0 |
360 |
240 |
500 |
600 |
460 |
220 | |
|
0 |
0 |
0 |
330 |
360 |
290 |
230 |
650 | |
|
V= |
0 |
0 |
0 |
0 |
900 |
210 |
420 |
640 |
|
0 |
0 |
0 |
0 |
0 |
310 |
620 |
620 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
610 |
1040 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
80 | |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
![]() ;
;

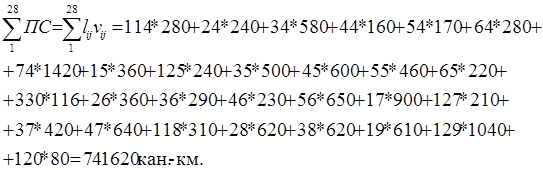
Расчет суммарной протяженности связей при n=nmax=28
Перейти на страницу: 1 2
Статья в тему
Система регулирования печи
автоматизация печь
микропроцессорный контроллер
Объектом автоматизации является печь для сжигания
органических отходов. Как видно из рисунка 1, в топку печи через регулирующие
органы подаются отходы, воздух и газ. Причем наносить управляющие воздействия
можно при помощи регулирующих о ...