Классификация транкинговых систем
транкинговая сеть ветвь разнесение
Расчетная часть
Требуется рассчитать вероятность ошибки BER для 64QAM сигнала с C/N = 26 дБ. Скорость кодирования CR = ѕ. Гауссов канал приема.
Решение:
. Обобщая все формулы пересчета, вычисляем требуемое Eb/No через требуемое C/N:
 , (
, (
92 ед.)
2. Подставляем численное значение Eb/ No в формулу
для расчета вероятности ошибки (L = 8):
В нашем случае x=2/7 (для 64QAM). Подставляем это численное значение в  , вычисляем расчетное значение
, вычисляем расчетное значение ![]() (
(![]() ).
).
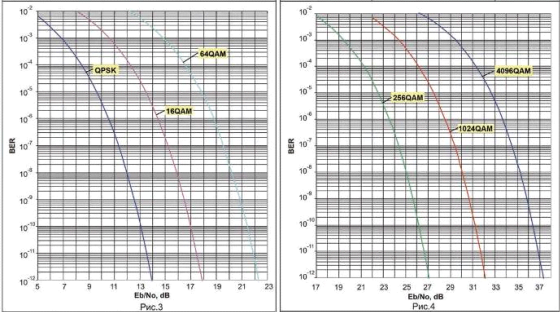
. Для минимизации расчетов на рис.3 и рис.4 представлены кривые зависимости BER от ![]() в логарифмическом масштабе. С точки зрения практического применения, точность графических отсчетов вполне достаточна, так как в любом случае приходиться применять коэффициент запаса порядка 3 дБ.
в логарифмическом масштабе. С точки зрения практического применения, точность графических отсчетов вполне достаточна, так как в любом случае приходиться применять коэффициент запаса порядка 3 дБ.
На практике может быть и обратная задача. Например, найти требуемое минимальное значение C/N для DVB-C сигнала при формате модуляции 256QAM с a=0,15. Задано минимальное значение BER=105.
В этом случае используют кривую рис.4 и находят Eb/N0=22,5 дБ. Далее используются нужные формулы пересчета.
В данном случае:

Заключение
Разнесение позволяет существенным образом улучшить характеристики помехоустойчивости приема и надежность цифровых систем радиосвязи. Как следует из приведенных зависимостей наличие двух ветвей разнесения позволяет снизить значение С/I, соответствующее отсутствию разнесения. Достаточно малогабаритные и относительно недорогие системы разнесения в настоящее время широко используются в системах мобильной радиосвязи, сотовой телефонии и передачи данных.
Улучшение характеристики помехоустойчивости, обеспечиваемое за счет различных методов разнесения, может оцениваться по степени уменьшения допустимых значений С/N и С/I при фиксированном значении Ре. Влияние различных методов разнесения на улучшение характеристик помехоустойчивости цифровых систем радиосвязи при наличии релеевских замираний из-за многолучевости анализировалось. Применительно к цифровым системам подвижной радиосвязи улучшение характеристик помехоустойчивости за счет разнесения рассматривалось с учетом влияния неселективных замираний огибающей. Причем достаточно подробно исследовалось влияние последетекторного автовыбора на снижение усредненной вероятности ошибок при приеме МЧМ сигналов в сухопутных системах подвижной радиосвязи.
Статья в тему
Система регулирования печи
автоматизация печь
микропроцессорный контроллер
Объектом автоматизации является печь для сжигания
органических отходов. Как видно из рисунка 1, в топку печи через регулирующие
органы подаются отходы, воздух и газ. Причем наносить управляющие воздействия
можно при помощи регулирующих о ...