Построение кривой переходного процесса в замкнутой системе по её математическому описанию
Для построения кривой переходного процесса на ЭВМ воспользуемся пакетом «ТАУ». Подставим данные исследуемую системы в типовую схему и исследуем ее.
|
t |
0 |
9,05 |
14,02 |
17,85 |
23,08 |
26,65 |
35,70 |
44,5 |
53,1 |
62 |
|
h(t) |
0 |
1,59 |
1 |
0,64 |
1 |
1,21 |
0,86 |
1,07 |
0,95 |
1,02 |
Получим следующую кривую переходного процесса:
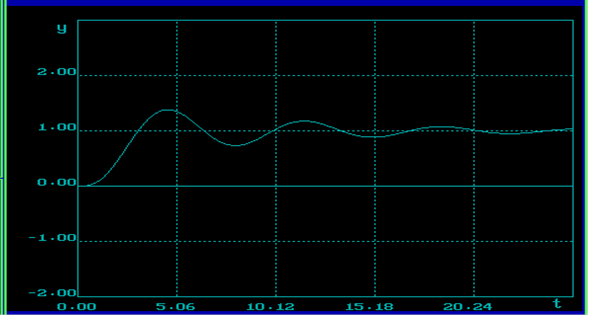
График кривой переходного процесса, в VisSim 3.0E
Статья в тему
Трехфазный выпрямитель, работающий на активно-индуктивную нагрузку
Электронные
аппараты, отнесенные к устройствам силовой электроники, используются в
различных системах и источниках электропитания, которые служат для
преобразования электрической энергии с одними параметрами в электрическую
энергию с другими параметрами. Например, преобразование ...